





- 電工電子電氣實(shí)訓(xùn)設(shè)備
- 電力電子電機(jī)實(shí)訓(xùn)裝置
- 過(guò)程控制實(shí)驗(yàn)裝置
- 工業(yè)機(jī)器人智能制造
- 維修電工實(shí)訓(xùn)設(shè)備
- PLC自動(dòng)化實(shí)訓(xùn)設(shè)備
- 數(shù)控機(jī)床實(shí)訓(xùn)考核裝置
- 數(shù)控機(jī)床機(jī)械加工設(shè)備
- 機(jī)床電氣實(shí)訓(xùn)裝置
- 機(jī)電一體化實(shí)訓(xùn)設(shè)備
- 機(jī)械示教陳列柜
- 機(jī)械專業(yè)實(shí)驗(yàn)設(shè)備
- 傳感器檢測(cè)實(shí)驗(yàn)室設(shè)備
- 工業(yè)互聯(lián)人工智能實(shí)訓(xùn)設(shè)備
- 特種作業(yè)操作實(shí)訓(xùn)考核設(shè)備
- 物聯(lián)網(wǎng)實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 消防、給排水實(shí)訓(xùn)設(shè)備
- 網(wǎng)絡(luò)布線實(shí)訓(xùn)室設(shè)備
- 電梯安裝維修實(shí)訓(xùn)考核設(shè)備
- 熱工暖通家電制冷實(shí)訓(xùn)設(shè)備
- 樓宇智能化實(shí)訓(xùn)設(shè)備
- 環(huán)境工程實(shí)驗(yàn)裝置
- 流體力學(xué)實(shí)驗(yàn)裝置
- 化工專業(yè)實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 新能源實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 電力供配電實(shí)訓(xùn)設(shè)備
- 煤礦礦山實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 液壓氣動(dòng)實(shí)驗(yàn)室設(shè)備
- 教學(xué)仿真軟件
- 軌道交通實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 船舶實(shí)訓(xùn)考核裝置
- 駕駛模擬訓(xùn)練設(shè)備
- 新能源汽車實(shí)訓(xùn)設(shè)備
- 汽車發(fā)動(dòng)機(jī)底盤實(shí)訓(xùn)臺(tái)
- 汽車電器電子實(shí)訓(xùn)臺(tái)
- 特種車工程機(jī)械實(shí)訓(xùn)設(shè)備
- 智能網(wǎng)聯(lián)汽車實(shí)訓(xùn)設(shè)備
- 醫(yī)學(xué)教學(xué)模型
- 中小學(xué)實(shí)驗(yàn)室設(shè)備
- 實(shí)驗(yàn)箱.實(shí)驗(yàn)儀
- 光電子通信實(shí)驗(yàn)裝置
- 儀器設(shè)備.教學(xué)掛圖
- LG-TSV05型智能網(wǎng)聯(lián)自動(dòng)駕駛微縮車
- LG-ITP02型智能網(wǎng)聯(lián)汽車視覺(jué)識(shí)別實(shí)訓(xùn)臺(tái)
- LG-IH05型智能網(wǎng)聯(lián)汽車超聲波雷達(dá)便攜式實(shí)驗(yàn)箱
- LG-ITP03型智能網(wǎng)聯(lián)汽車激光雷達(dá)實(shí)訓(xùn)臺(tái)
- LG-IH04型智能網(wǎng)聯(lián)汽車組合導(dǎo)航系統(tǒng)便攜式實(shí)驗(yàn)箱
- LG-IH01型智能網(wǎng)聯(lián)汽車毫米波雷達(dá)便攜式實(shí)驗(yàn)箱
- LG-IKP013型智能網(wǎng)聯(lián)汽車決策規(guī)劃仿真實(shí)訓(xùn)臺(tái)
- LG-TSV07型智能網(wǎng)聯(lián)乘用車高級(jí)開(kāi)發(fā)教學(xué)平臺(tái)
- LG-TSV10型智能網(wǎng)聯(lián)車路協(xié)同智慧燈桿
- LG-TSV08型智能網(wǎng)聯(lián)微縮車平行駕駛系統(tǒng)
- LG-TSV11型智能網(wǎng)聯(lián)車路協(xié)同沙盤及云控平臺(tái)
- LG-IZC02型智能網(wǎng)聯(lián)自動(dòng)駕駛小巴(8座 荷載15人)
- LG-JXY014型機(jī)械傳動(dòng)與液壓控制實(shí)訓(xùn)平臺(tái)
- LG-JXY012型工業(yè)機(jī)械傳動(dòng)與液壓調(diào)試平臺(tái)
- LGY-JD011型機(jī)電液一體化智能綜合實(shí)訓(xùn)平臺(tái)(液壓
- LG-DLK01型 電力系統(tǒng)綜合自動(dòng)化實(shí)驗(yàn)平臺(tái)
- LG系列 智能建筑實(shí)驗(yàn)實(shí)訓(xùn)裝置
- LGJS-3型 模塊式柔性環(huán)形自動(dòng)生產(chǎn)線及工業(yè)機(jī)器人
- LGJX-82E型 立體倉(cāng)庫(kù)實(shí)訓(xùn)裝置
- LGJS-1型 現(xiàn)代物流倉(cāng)儲(chǔ)自動(dòng)化實(shí)驗(yàn)系統(tǒng)
- LGJS-2型 模塊式柔性自動(dòng)環(huán)形生產(chǎn)線實(shí)驗(yàn)系統(tǒng)(工
- LG-2400型 數(shù)控模組化生產(chǎn)流水線綜合系統(tǒng)(CD制程
- LGJD-01型 光機(jī)電一體化控制實(shí)訓(xùn)裝置
- LGJD-02型 光機(jī)電一體化控制實(shí)訓(xùn)裝置
- LG-235A 光機(jī)電一體化高速分揀實(shí)訓(xùn)系統(tǒng)
- LGK-III型 數(shù)控車/銑床綜合考核裝置(二合一/生產(chǎn)型
- LG-AT2型 自控原理與計(jì)算機(jī)控制實(shí)驗(yàn)儀
- LG-NLY01型 樓宇智能化工程實(shí)訓(xùn)系統(tǒng)
- LGZK-201G 自動(dòng)化綜合實(shí)訓(xùn)裝置( PLC、直流調(diào)速、觸
- LGPD-205B型 PLC、單片機(jī)及微機(jī)原理綜合實(shí)訓(xùn)裝置
- 智能交通綜合實(shí)訓(xùn)室建設(shè)方案
- 高壓供配電實(shí)訓(xùn)室設(shè)備建設(shè)方案
- 軌道交通實(shí)訓(xùn)室設(shè)備實(shí)訓(xùn)建設(shè)方案
- 焊接實(shí)訓(xùn)室工位隔斷排煙建設(shè)方案
- 自動(dòng)化控制實(shí)驗(yàn)室建設(shè)方案論證
- 電工實(shí)驗(yàn)實(shí)訓(xùn)室建設(shè)方案論證報(bào)告
- 電氣自動(dòng)化控制實(shí)訓(xùn)室建設(shè)方案
- 工業(yè)機(jī)器人1+X證書(shū)試點(diǎn)項(xiàng)目建設(shè)方案
- 消防培訓(xùn)系統(tǒng)建設(shè)方案
- 水泵拆解檢修實(shí)訓(xùn)系統(tǒng)
LGWL-WL02型 倉(cāng)儲(chǔ)物流物聯(lián)網(wǎng)實(shí)訓(xùn)系統(tǒng)
品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
一、系統(tǒng)簡(jiǎn)介
LGWL-WL02型 倉(cāng)儲(chǔ)物流物聯(lián)網(wǎng)實(shí)訓(xùn)系統(tǒng)以倉(cāng)儲(chǔ)管理和物流運(yùn)輸為背景,以貨物出入港口以及倉(cāng)儲(chǔ)的流程為核心,以港口及倉(cāng)儲(chǔ)貨物的智能化裝卸與交通運(yùn)輸為研究?jī)?nèi)容,構(gòu)建的一套類似真實(shí)的現(xiàn)代化港口倉(cāng)儲(chǔ)物流實(shí)訓(xùn)系統(tǒng),主要模擬周轉(zhuǎn)于倉(cāng)庫(kù)與港口碼頭之間的貨物裝卸、運(yùn)輸、盤點(diǎn)的流程。
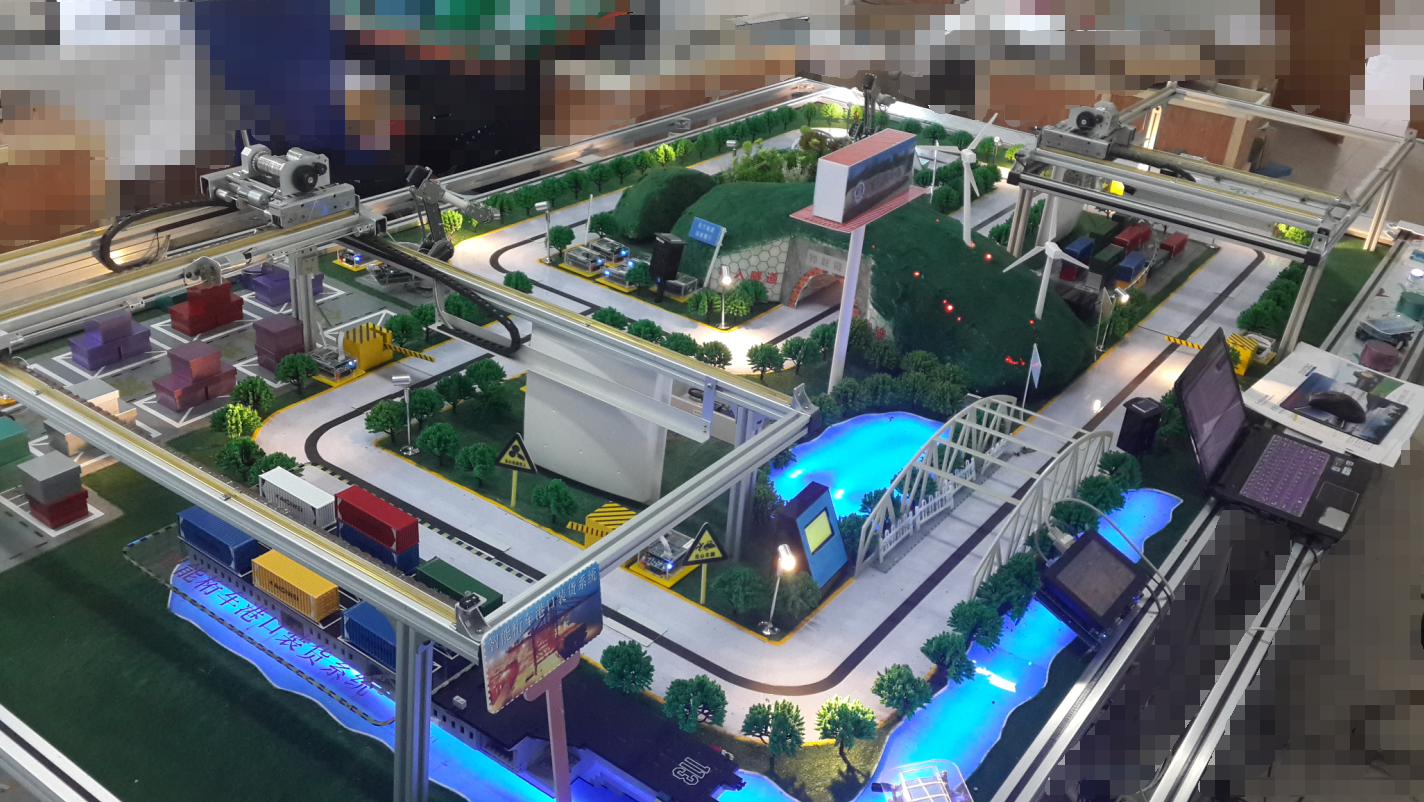
圖片供參考,以實(shí)物為準(zhǔn)
LGWL-WL02型 倉(cāng)儲(chǔ)物流物聯(lián)網(wǎng)實(shí)訓(xùn)系統(tǒng)由智能倉(cāng)儲(chǔ)物流網(wǎng)關(guān)、集裝箱絎車裝卸貨子系統(tǒng),智能車輛運(yùn)輸子系統(tǒng)、立體倉(cāng)儲(chǔ)管理子系統(tǒng)、機(jī)器臂裝卸貨子系統(tǒng)、港口智能車輛出入ETC收費(fèi)子系統(tǒng)幾大系統(tǒng)組成。以下是各個(gè)子系統(tǒng)的協(xié)作流程:
1、貨物經(jīng)過(guò)RFID標(biāo)簽綁定等初始化工作完成后,放置于港口碼頭區(qū)的集裝箱區(qū)。
2、當(dāng)有運(yùn)貨調(diào)度至倉(cāng)庫(kù)指令在智能倉(cāng)儲(chǔ)物流網(wǎng)關(guān)上下達(dá)之后,智能車輛進(jìn)入港口,智能道閘識(shí)別車輛后會(huì)自動(dòng)打開(kāi),并實(shí)時(shí)語(yǔ)音播報(bào)到達(dá)站目的地的信息。當(dāng)智能車輛準(zhǔn)確停放在裝卸貨指定地點(diǎn)時(shí),可手動(dòng)選擇要裝入車輛貨物的位置,然后系統(tǒng)通過(guò)集裝箱桁車裝卸貨系統(tǒng)自動(dòng)進(jìn)行裝卸貨過(guò)程。
3、當(dāng)智能車倆離開(kāi)港口,智能港口出口道閘自動(dòng)打開(kāi),并顯示在此港口停留的所花的費(fèi)用,在點(diǎn)陣上實(shí)時(shí)的顯示出價(jià)格。經(jīng)過(guò)幾個(gè)指定的站點(diǎn),車輛攜帶貨物到達(dá)倉(cāng)庫(kù)入口,通過(guò)立體倉(cāng)儲(chǔ)管理子系統(tǒng)應(yīng)用RFID讀卡技術(shù)對(duì)貨物進(jìn)行入庫(kù)操作、此系統(tǒng)能夠自動(dòng)分配庫(kù)位,并驅(qū)動(dòng)堆垛機(jī)完成貨物上架操作,完成倉(cāng)儲(chǔ)入庫(kù)流程。
4、當(dāng)有倉(cāng)庫(kù)貨物運(yùn)至港口指令在智能倉(cāng)儲(chǔ)物流網(wǎng)關(guān)上下達(dá)之后,智能車輛駛?cè)雮}(cāng)庫(kù)區(qū)停在出庫(kù)位置。立體倉(cāng)儲(chǔ)管理驅(qū)動(dòng)堆垛機(jī)將指定的貨物下架,并自動(dòng)裝卸至智能能車輛上。完成倉(cāng)儲(chǔ)出庫(kù)流程。
5、智能車輛離開(kāi)倉(cāng)庫(kù),到達(dá)港口卸貨區(qū),由機(jī)器臂裝卸貨子系統(tǒng)完成卸貨任務(wù),并將貨物放入指定位置。
6、立體倉(cāng)儲(chǔ)管理子系統(tǒng)中包含RFID自動(dòng)盤點(diǎn)功能。
以上一個(gè)裝卸貨流程完畢后,智能車輛將進(jìn)入執(zhí)行下一次裝卸貨任務(wù)。
二、系統(tǒng)構(gòu)成
倉(cāng)儲(chǔ)物流交通實(shí)訓(xùn)系統(tǒng)覆蓋物聯(lián)網(wǎng)的傳感層、網(wǎng)絡(luò)鏈路層、網(wǎng)關(guān)、以及應(yīng)用層。智能網(wǎng)關(guān)是整個(gè)系統(tǒng)的核心,是連接傳感層與應(yīng)用層的橋梁。系統(tǒng)拓?fù)淙鐖D所示。
儲(chǔ)物流交通實(shí)訓(xùn)系統(tǒng)")
三、系統(tǒng)功能
1、集裝箱桁車裝卸貨系統(tǒng)
智能桁車裝卸貨系統(tǒng),是港口物流系統(tǒng)的重要組成部分,主要由多自由度全方位電機(jī)構(gòu)成,采用單片機(jī)控制運(yùn)動(dòng)軌跡。當(dāng)小車到達(dá)裝卸貨指定地點(diǎn)時(shí),通過(guò)無(wú)線向倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理平臺(tái)發(fā)出命令,倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理平臺(tái)接收到后,通過(guò)無(wú)線通信向桁車控制器發(fā)送裝卸貨指令,桁車控制器接收到命令后,就按照指定的取貨位置,操作X/Y/Z軸電機(jī)運(yùn)動(dòng),從而實(shí)現(xiàn)貨物的自動(dòng)裝卸。貨物裝卸完成后,運(yùn)輸車自動(dòng)離開(kāi)。
該桁車結(jié)構(gòu)合理、剛性好,運(yùn)行平穩(wěn)、噪聲小,全自動(dòng)程控運(yùn)行,能夠穩(wěn)定可靠地實(shí)現(xiàn)港口貨物的全方位抓取與放置。
2、智能車輛運(yùn)輸系統(tǒng)
智能小車需要實(shí)現(xiàn)循跡、自動(dòng)駕駛、無(wú)線通訊、避障、車輛運(yùn)動(dòng)控制、路況信息采集等功能。目前小車搭載的系統(tǒng)包括:電機(jī)控制系統(tǒng),循跡系統(tǒng),Zigbee通訊系統(tǒng),WIFI無(wú)線通訊系統(tǒng), RFID系統(tǒng)等。
3、倉(cāng)儲(chǔ)環(huán)節(jié)—立體倉(cāng)儲(chǔ)管理
智能車將物品運(yùn)送到倉(cāng)儲(chǔ)中心。倉(cāng)儲(chǔ)中心采用2*6立體庫(kù)位,通過(guò)堆垛機(jī)進(jìn)行存取。系統(tǒng)通過(guò)倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理平臺(tái)獲取庫(kù)位信息,控制堆垛機(jī)將車輛上的物品運(yùn)送到立體倉(cāng)儲(chǔ)中,或?qū)?kù)位的物品運(yùn)送到運(yùn)輸車輛上。堆垛機(jī)具有x、y、z三軸直線運(yùn)動(dòng)控制行程,能實(shí)現(xiàn)物品自動(dòng)存放、自動(dòng)取回以及自動(dòng)搬運(yùn)的功能。使用工業(yè)超高頻讀卡器實(shí)現(xiàn)物品的出入庫(kù)管理。
(1)立體倉(cāng)儲(chǔ)管理 - 出入庫(kù)及上下架管理
入庫(kù)系統(tǒng)主要實(shí)現(xiàn)貨物入庫(kù)的智能化管理。首先為每個(gè)待入庫(kù)貨物粘貼超高頻電子標(biāo)簽,給每個(gè)貨物一個(gè)標(biāo)識(shí)。由立庫(kù)管理系統(tǒng)為該貨物分配一個(gè)庫(kù)位。
入庫(kù)區(qū)安裝有RFID數(shù)據(jù)信息采集器、堆垛機(jī)、立體倉(cāng)庫(kù)貨架等設(shè)備。系統(tǒng)利用RFID設(shè)備的識(shí)別技術(shù)將入庫(kù)貨物接入倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)運(yùn)行的管理系統(tǒng)中。貨物運(yùn)輸車輛運(yùn)送貨物到達(dá)倉(cāng)庫(kù)入庫(kù)口,由堆垛機(jī)機(jī)器臂搬運(yùn)貨物至立體倉(cāng)庫(kù)內(nèi)完成上架和入庫(kù)工作。
出庫(kù)時(shí),首先在智能倉(cāng)儲(chǔ)物流網(wǎng)關(guān)上選擇出貨庫(kù)位,然后系統(tǒng)將控制模擬堆垛機(jī)移動(dòng)到相應(yīng)庫(kù)位的上方;然后系統(tǒng)控制庫(kù)位滑臺(tái)控制器,驅(qū)動(dòng)絲杠旋轉(zhuǎn),移出滑臺(tái)和庫(kù)位;然后控制模擬堆垛機(jī)沿豎直方向向下運(yùn)行達(dá)到貨物處,抓取貨物。庫(kù)位退回到原處。最后堆垛機(jī)移出貨物,搬運(yùn)到運(yùn)貨車輛上,完成下架和出庫(kù)工作。
(2)立體倉(cāng)儲(chǔ)管理 倉(cāng)儲(chǔ)貨物動(dòng)態(tài)盤點(diǎn)系統(tǒng)
智能顯示系統(tǒng)作為倉(cāng)儲(chǔ)貨物統(tǒng)計(jì)的一個(gè)重要環(huán)節(jié),通過(guò)RFID技術(shù),將統(tǒng)計(jì)當(dāng)前倉(cāng)儲(chǔ)總貨物數(shù)量,當(dāng)堆垛機(jī)控制器將貨物提放到小車上離開(kāi)倉(cāng)儲(chǔ),立體倉(cāng)儲(chǔ)管理將自動(dòng)將貨物的數(shù)量減少一個(gè)。
4、機(jī)器臂裝卸貨子系統(tǒng)
對(duì)于從倉(cāng)儲(chǔ)到港口的貨物,可采用機(jī)器臂控制系統(tǒng)裝卸貨。六自由度機(jī)械臂的臂部由大臂、小臂組成,一般具有兩個(gè)自由度,即伸縮、回轉(zhuǎn)、俯仰或升降,采用單片機(jī)控制運(yùn)動(dòng)軌跡。當(dāng)小車到達(dá)裝卸貨指定地點(diǎn)時(shí),通過(guò)無(wú)線向倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理平臺(tái)發(fā)出命令,倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理平臺(tái)接收到后,通過(guò)無(wú)線通信向機(jī)器臂控制器發(fā)送裝卸貨指令,控制器接收到命令后,就按照指定的取貨位置,操作機(jī)器臂經(jīng)過(guò)回轉(zhuǎn)、伸縮、升降、俯仰等幾組動(dòng)作組合,實(shí)現(xiàn)貨物的自動(dòng)裝卸。貨物裝卸完成后,運(yùn)輸車自動(dòng)離開(kāi)。
5、港口智能車輛出入ETC收費(fèi)管理系統(tǒng)
出入港口道閘識(shí)別開(kāi)啟系統(tǒng)( 又稱智能車輛識(shí)別),利用車輛自動(dòng)識(shí)別(Automatic Vehicle Identification簡(jiǎn)稱AVI)技術(shù)、網(wǎng)絡(luò)技術(shù)完成車輛與監(jiān)控中心之間的無(wú)線數(shù)據(jù)通訊,實(shí)現(xiàn)智能開(kāi)啟道閘系統(tǒng)。使用該系統(tǒng),車主只要在車窗上安裝感應(yīng)卡并錄入信息,通過(guò)出入口時(shí)便不用人工開(kāi)啟道閘,也無(wú)須停車,將自動(dòng)識(shí)別車主身份從而開(kāi)啟道閘。
智能道閘系統(tǒng)實(shí)用化比較多的一個(gè)系統(tǒng),由于其無(wú)人化操作的優(yōu)越性以及成本方面帶來(lái)的優(yōu)勢(shì),在模擬智能交通過(guò)程中一定要加入這個(gè)模塊。同時(shí)當(dāng)小車離開(kāi)港口時(shí),車輛離開(kāi)信息將在LED點(diǎn)陣屏上顯示出來(lái)。
四、主要軟件系統(tǒng)
1、倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理軟件
倉(cāng)儲(chǔ)物流貨網(wǎng)關(guān)管理軟件通過(guò)網(wǎng)關(guān)與各個(gè)設(shè)備和子系統(tǒng)進(jìn)行信息交互;以RFID設(shè)備作為倉(cāng)儲(chǔ)物流核心技術(shù),智能車倆作為各個(gè)環(huán)節(jié)的紐帶,應(yīng)用絎車、機(jī)械臂、堆垛機(jī)模擬自動(dòng)化裝卸,使用立體倉(cāng)庫(kù)實(shí)現(xiàn)物品倉(cāng)儲(chǔ)管理,結(jié)合有線網(wǎng)絡(luò)、ZigBee傳感器網(wǎng)絡(luò)、嵌入式技術(shù)、Android開(kāi)發(fā)等關(guān)鍵技術(shù),在整個(gè)環(huán)節(jié)中處于有效監(jiān)控中,實(shí)現(xiàn)各個(gè)子系統(tǒng)的信息讀取、傳輸與控制。同時(shí)管理數(shù)據(jù)庫(kù)信息的查詢與上傳,可及時(shí)顯示當(dāng)前數(shù)據(jù)庫(kù)中的內(nèi)容,上傳至云主機(jī)中去實(shí)時(shí)的跟新。
2、倉(cāng)儲(chǔ)貨物出入庫(kù)系統(tǒng)
智能顯示系統(tǒng)作為港口貨物統(tǒng)計(jì)的一個(gè)重要環(huán)節(jié),通過(guò)RFID技術(shù),將統(tǒng)計(jì)當(dāng)前倉(cāng)儲(chǔ)總貨物數(shù)量,當(dāng)控制器將港口貨物提放到小車上離開(kāi)港口,信息機(jī)將自動(dòng)將港口貨物的數(shù)量減少一個(gè);
當(dāng)貨物被運(yùn)送至卸貨區(qū)域時(shí),小車信息機(jī)顯示并提示貨物安全運(yùn)送至目的地,如果貨物長(zhǎng)時(shí)間未送至卸貨區(qū)域時(shí),將顯示提示信息。
3、立體倉(cāng)庫(kù)管理系統(tǒng)
立體倉(cāng)庫(kù)管理軟件運(yùn)行在整個(gè)系統(tǒng)的中央控制器上,軟件采用android系統(tǒng)開(kāi)發(fā),內(nèi)嵌Sqlite數(shù)據(jù)庫(kù),采用android庫(kù)編寫的人機(jī)交互界面,主要包括貨物自動(dòng)識(shí)別、出入庫(kù)管理、倉(cāng)庫(kù)貨物自動(dòng)盤點(diǎn)等。
四、技術(shù)參數(shù)
|
1.智能網(wǎng)關(guān) 使用 Cortex-A9四核處理器,主頻最大1.6GHz,內(nèi)存不低于1GB,Flash不低于8GB; 顯示屏:7寸IPS電容屏(16:9),分辨率1024×600; 板載1路CAN總線、1路485總線等現(xiàn)場(chǎng)總線接口; 板載1組24P排線接口,含用于I/O、I2C、SPI、A/D、PWM、UART,用于外部功能擴(kuò)展。 要求板載WiFi/BT二合一通訊模塊; 內(nèi)置Linux系統(tǒng)與Android系統(tǒng),支持雙系統(tǒng)一鍵切換。 ★具備安全算法研究功能:支持傳感網(wǎng)輕量級(jí)算法LBlock、KASUMI算法、AES算法、ZUC算法、snow 3G等至少五種以上的安全算法,能夠進(jìn)行算法安全測(cè)評(píng),對(duì)安全算法的計(jì)算量、復(fù)雜度等進(jìn)行統(tǒng)計(jì),顯示統(tǒng)計(jì)圖,顯示ZigBee節(jié)點(diǎn)入網(wǎng)認(rèn)證流程圖和幀類型統(tǒng)計(jì)圖。 2.桁車裝卸機(jī)器 采用鋁合金材料設(shè)計(jì)制作,用于模擬港口集裝箱的桁車搬運(yùn)系統(tǒng)。 可垂直抓取車輛運(yùn)輸?shù)募b箱貨物,搬運(yùn)到指定位置; 具有x、y、z三個(gè)自由度的移動(dòng)行程; 工作電壓:?jiǎn)蜗嗳€ 交流電220V 50hz; 直流電機(jī)供電電源:12V或24V; 工作溫度:-20℃~+40℃ 濕度環(huán)境:<95%RH; 絕緣電阻:100MΩ; 絕緣等級(jí):B; 3.桁車裝卸控制器 由智能通信節(jié)點(diǎn)、桁車?yán)^電器控制板組成。 智能通信節(jié)點(diǎn)主要用來(lái)接收港口物流網(wǎng)關(guān)發(fā)送來(lái)的控制命令,并驅(qū)動(dòng)桁車?yán)^電器控制板;接收到節(jié)點(diǎn)發(fā)送的控制命令后,通過(guò)光電隔離輸出驅(qū)動(dòng)繼電器吸合,進(jìn)而控制桁車起重機(jī)上的直流電機(jī)運(yùn)轉(zhuǎn),實(shí)現(xiàn)使桁車按預(yù)設(shè)的行程移動(dòng)。 4.六自由度機(jī)器臂 由機(jī)械臂、末端氣泵吸盤裝置組成。機(jī)械臂采用全鋁合金機(jī)械臂本體、MS36行星減速步進(jìn)電機(jī)、500線AB相光電編碼器、鋁合金聯(lián)軸器、軸承、關(guān)節(jié)軸、銅柱等部件連接而成;末端氣泵吸盤由真空氣泵、真空活動(dòng)連桿帶吸盤、閥門、硅膠氣管組成。 活動(dòng)關(guān)節(jié)均采用優(yōu)質(zhì)軸承連接,末端采用特定方式吸附物品。 由嵌入式微控制器通過(guò)編程實(shí)現(xiàn)運(yùn)動(dòng)控制。 負(fù)載能力:500g 流體:氣體; 氣泵電機(jī):采用碳刷換向器,額定電壓DC4.5V,空載電流0.35A,適合電壓DC3-5V,壓力范圍400-650mmhg;通過(guò)微控制器I/O控制電機(jī)工作; 三通電磁閥:通過(guò)微控制器I/O控制電磁閥的通道,從而接通充氣回路,吸盤吸附或釋放氣體,吸盤松開(kāi); 5.六自由度機(jī)器臂控制器 采用Cortex-M4以上內(nèi)核微控制器,板載4路LV8731V驅(qū)動(dòng)模塊驅(qū)動(dòng)機(jī)械臂步進(jìn)電機(jī)、板載電源轉(zhuǎn)接板、OLED顯示屏等外設(shè),電機(jī)帶編碼器,形成位置閉環(huán)控制,重復(fù)精度大大提高。支持串口、RS485總線控制,可以通過(guò)其他的單片機(jī)或者電腦發(fā)送控制指令。支持按鍵控制,可以通過(guò)按鍵去控制X Y Z的坐標(biāo)。 電源適配器供電。 協(xié)議:ModbusRTU協(xié)議 額定電壓:DC12V 額定電流:5A 6.RFID超高頻讀卡器 功能:用于讀取產(chǎn)品攜帶的電子標(biāo)簽,識(shí)別相關(guān)信息。 工作頻率:國(guó)標(biāo)(920~925MHz)、美標(biāo)(902~928MHz)或定制其它頻段跳頻或定頻工作; 識(shí)別標(biāo)簽:ISO18000-6B標(biāo)簽、EPC GEN2(ISO18000-6C)標(biāo)簽; 讀卡距離:識(shí)別距離調(diào)整范圍:0.1米; 讀卡靈敏度:雙極化方式讀卡; 讀卡時(shí)間:?jiǎn)螛?biāo)簽64位ID號(hào)讀取時(shí)間<6mS; 數(shù)據(jù)接口:Mini USB; 工作電壓:USB接口取電,DC5V; 工作溫度:-20℃ ~ +80℃; 存儲(chǔ)溫度:-40℃ ~ +85℃; 7.RFID防干擾標(biāo)簽 規(guī)格參數(shù):頻率:860-960MHz, 芯片:PEC GEN2,Alien Higgs 標(biāo)準(zhǔn):符合ISO18000-6C、EPC-Gen2 內(nèi)存:96 Bits 或擴(kuò)展到 512 Bits 尺寸:(定制) 距離:1-3-5-8-10-20-30米(示讀卡器性能和具體應(yīng)用環(huán)境決定讀寫距離) 防沖突:每秒可讀30-60張卡數(shù)量 8.超高頻天線 915M多通道讀寫天線 9.智能倉(cāng)庫(kù)模型 采用20mm*20mm鋁合金型材框架設(shè)計(jì),可拆卸,可根據(jù)需求自由組合; 車庫(kù)數(shù)量:四行六列,共24個(gè)存儲(chǔ)庫(kù)位; 高層貨架存儲(chǔ),節(jié)省庫(kù)存占地面積,提高空間利用率; 通過(guò)托盤方式存儲(chǔ)貨物,一個(gè)托盤可存儲(chǔ)兩個(gè)原料或成品; 每個(gè)庫(kù)位尺寸:寬*高=91mm*67mm。 10.堆垛機(jī) 采用三軸懸臂式滑臺(tái)模組,滾珠絲杠直線滑臺(tái)模組密封防塵; 具有x、y、z三個(gè)運(yùn)動(dòng)行程,搬運(yùn)尺寸:1000mm、400mm、300mm。 采用閉環(huán)57規(guī)格步進(jìn)電機(jī)驅(qū)動(dòng)2.2牛米高速混合伺服; 采用三個(gè)金屬探測(cè)器進(jìn)行原點(diǎn)探測(cè); 采用貨叉式存取貨物; 單元貨物重量:1g-1000g; 提升速度:5m/min 出叉速度:3.6m/min 定位精度:±5mm 供電電壓:DC 24V 11.堆垛機(jī)控制器 CPU:Cortex-M3 內(nèi)核處理器; 具有2相4線步進(jìn)電機(jī)驅(qū)動(dòng)接口; 可調(diào)試步進(jìn)電機(jī)驅(qū)動(dòng)器控制(寬電壓,脈沖速度可調(diào)); 具有通用修阻機(jī)參數(shù)處理系統(tǒng)相關(guān)軟件著作權(quán)證書(shū)復(fù)印件并加蓋原廠公章。 可擴(kuò)展四路控制; 采用金屬探測(cè)傳感器實(shí)現(xiàn)庫(kù)位檢測(cè); 通訊方式:采用ZigBee無(wú)線通訊; 供電電壓:DC12V 12.物流集裝箱 定制 13.貨輪模型 定制 14.智能道閘 主要接收網(wǎng)關(guān)控制命令,控制道閘開(kāi)關(guān)。 主要包括5線減速步進(jìn)電機(jī)、單片機(jī)、ZigBee通信模塊等,封裝在道閘模具內(nèi)。 15.收費(fèi)顯示屏 通過(guò)接收網(wǎng)關(guān)發(fā)來(lái)的收費(fèi)信息,顯示在收費(fèi)點(diǎn)陣顯示屏上。 設(shè)備信息:75 單色室內(nèi)高亮LED; 紅色4字LED點(diǎn)陣; 通信方式:ZigBee 16.道閘控制器 控制器:STC11F04E單片機(jī), 控制設(shè)備:5線減速永磁步進(jìn)電機(jī); 通信方式:ZigBee; 驅(qū)動(dòng)方式:四相八拍,采用ULN2003驅(qū)動(dòng); 齒輪減速比:1/64,齒輪減速,噪音低,運(yùn)轉(zhuǎn)平穩(wěn);供電:DC 5V; 17.智能物流車 1)智能磁導(dǎo)航車(2個(gè)) 由磁導(dǎo)航傳感器、高頻RFID讀卡器、核心控制板、直流減速電機(jī)、無(wú)線通信模塊、鋰電池供電板、避障探頭等組成。 磁導(dǎo)航傳感器: 車頭前方底部安裝3個(gè)磁導(dǎo)航探頭,與鋪設(shè)的磁條形成磁場(chǎng),處理器根據(jù)磁導(dǎo)航輸出的信號(hào)控制電機(jī)驅(qū)動(dòng)器差速糾偏,確保小車沿磁條前進(jìn)。 高頻RFID讀卡器: 控制器自帶高頻讀卡模塊和天線電路,自動(dòng)識(shí)別道路上的NFC標(biāo)簽,實(shí)現(xiàn)智能小車在道路中的定位功能; 核心控制板: 采用單片機(jī)作為智能車控制器,實(shí)時(shí)處理磁導(dǎo)航傳感器檢測(cè)的磁場(chǎng)信息,驅(qū)動(dòng)直流減速電機(jī)按照磁導(dǎo)引完成前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)、高速、低速行駛等自動(dòng)循跡功能;同時(shí)驅(qū)動(dòng)RFID讀卡器處于掃描狀態(tài),與鋪設(shè)在重要地點(diǎn)NFC標(biāo)簽形成磁場(chǎng),獲取標(biāo)簽所綁定的位置信息,通過(guò)無(wú)線模塊發(fā)送給智能網(wǎng)關(guān),實(shí)現(xiàn)車輛精準(zhǔn)定位; 無(wú)線通信模塊: 控制器通過(guò)串口與無(wú)線模塊通信,它將車輛信息通過(guò)無(wú)線模塊發(fā)送給智能網(wǎng)關(guān),同時(shí)也接收智能網(wǎng)關(guān)發(fā)來(lái)的命令,控制車輛運(yùn)行狀態(tài)。 小車供電: 小車采用鋰電池供電,具有電源管理電路和充電電路,小車行駛一段時(shí)間后,可對(duì)其進(jìn)行充電,保證小車正常行駛; 障礙物監(jiān)測(cè):前方有障礙物,停止行駛,障礙物移除,繼續(xù)行駛。 供電:DC12V3A 18.小車循跡標(biāo)簽 安裝在實(shí)訓(xùn)系統(tǒng)路面下方,用于車輛定位、定點(diǎn)停車。 19.倉(cāng)儲(chǔ)物流模型系統(tǒng) 設(shè)計(jì)尺寸不小于3*2m(長(zhǎng)×寬),模型臺(tái)面鋪設(shè)有設(shè)計(jì)倉(cāng)儲(chǔ)物流交通規(guī)劃圖,包括集裝箱倉(cāng)儲(chǔ)、桁車運(yùn)輸、機(jī)器臂裝卸、車輛運(yùn)輸?shù)拳h(huán)節(jié),含有景觀面板、城市道路、十字路口、交通燈、路燈、防護(hù)林、ETC收費(fèi)等模擬景觀,與智能網(wǎng)關(guān)、交通狀況感知節(jié)點(diǎn)、控制設(shè)備、攝像頭、智能車一起,構(gòu)成完整的智能倉(cāng)儲(chǔ)物流實(shí)訓(xùn)系統(tǒng)。 20.倉(cāng)儲(chǔ)物流網(wǎng)關(guān)應(yīng)用軟件 ▲網(wǎng)關(guān)采用Android操作系統(tǒng),運(yùn)行倉(cāng)儲(chǔ)物流網(wǎng)關(guān)應(yīng)用軟件,具有智能倉(cāng)儲(chǔ)設(shè)備管理系統(tǒng)相關(guān)軟件著作權(quán)證書(shū)復(fù)印件并加蓋原廠公章。 主要包括設(shè)備管理、車道尋跡、采集控制、關(guān)聯(lián)設(shè)置、系統(tǒng)設(shè)置等功能項(xiàng)目。采用模塊化設(shè)計(jì),靈活添加、配置、關(guān)聯(lián)的方式接入網(wǎng)關(guān)。 可添加智能車無(wú)線節(jié)點(diǎn)、環(huán)境監(jiān)測(cè)節(jié)點(diǎn)、機(jī)器臂控制器節(jié)點(diǎn)、道閘節(jié)點(diǎn)、庫(kù)位控制器節(jié)點(diǎn); 支持機(jī)器臂坐標(biāo)調(diào)節(jié)功能,可任意調(diào)節(jié)起始點(diǎn)和終點(diǎn)的坐標(biāo),實(shí)現(xiàn)物品的自動(dòng)搬運(yùn); 支持物品堆垛管理功能,可設(shè)置庫(kù)位的坐標(biāo)和編號(hào),控制堆垛機(jī)到指定庫(kù)位自動(dòng)存放; ▲支持物流小車自動(dòng)尋跡功能,可顯示小車運(yùn)行軌跡,物流運(yùn)輸信息,具有實(shí)時(shí)接收車輛位置信息、貨物的自動(dòng)裝卸、道閘自動(dòng)開(kāi)關(guān)、貨物自動(dòng)上下架、自動(dòng)收費(fèi)等功能,具有智能交通綜合管理調(diào)度平臺(tái)相關(guān)軟件著作權(quán)證書(shū)復(fù)印件并加蓋原廠公章。 內(nèi)置MQTT協(xié)議、HTTP協(xié)議,可將沙盤設(shè)備信息同步更新到平臺(tái)。 開(kāi)發(fā)環(huán)境要求: Windows 7以上 Android Studio 21.倉(cāng)儲(chǔ)物流管理云平臺(tái)軟件 ▲通過(guò)瀏覽器訪問(wèn)倉(cāng)儲(chǔ)物流web端管理平臺(tái),查看倉(cāng)儲(chǔ)物流系統(tǒng)的運(yùn)行情況,具有智能倉(cāng)儲(chǔ)綜合管理平臺(tái)相關(guān)軟件著作權(quán)證書(shū)復(fù)印件并加蓋原廠公章。 具有用戶登錄、系統(tǒng)設(shè)置、倉(cāng)儲(chǔ)盤點(diǎn)、物流信息等功能菜單,可點(diǎn)擊查看下一級(jí)菜單詳情; 主頁(yè)面顯示:車輛運(yùn)行位置動(dòng)態(tài)顯示、庫(kù)位信息動(dòng)態(tài)更新、機(jī)械臂運(yùn)行狀態(tài)顯示、ETC收費(fèi)信息顯示等。 系統(tǒng)設(shè)置:可設(shè)置庫(kù)位起始點(diǎn)坐標(biāo),庫(kù)位間隔、庫(kù)位數(shù)量等,可查看服務(wù)器IP地址和端口號(hào)等信息。 具有立體庫(kù)位倉(cāng)儲(chǔ)盤點(diǎn)功能,動(dòng)態(tài)更新倉(cāng)儲(chǔ)物品數(shù)量。 ★具有物流小車動(dòng)態(tài)跟蹤功能,可查看小車定點(diǎn)位置,與實(shí)際小車保持一致。具有雷達(dá)定位信息重放與重點(diǎn)區(qū)域放大功能,能導(dǎo)入已加密的雷達(dá)定位數(shù)據(jù),利用算法進(jìn)行分析處理;可在上位機(jī)虛擬仿真界面上顯示移動(dòng)目標(biāo),實(shí)現(xiàn)目標(biāo)位置的重放;并通過(guò)設(shè)置開(kāi)始量程、角度參數(shù)、放大倍數(shù)對(duì)移動(dòng)目標(biāo)重點(diǎn)區(qū)域進(jìn)行放大顯示,具有雷達(dá)仿真系統(tǒng)應(yīng)用軟件著作權(quán)證書(shū)復(fù)印件并加蓋原廠公章。 采用MQTT協(xié)議、HTTP協(xié)議,與實(shí)訓(xùn)系統(tǒng)信息保持同步。 開(kāi)發(fā)環(huán)境:IDEAIU2018; 22.教學(xué)資源 1.基礎(chǔ)單元應(yīng)用實(shí)驗(yàn) 1.1 智能車輛運(yùn)輸系統(tǒng) 智能小車讀取RFID實(shí)驗(yàn) 智能小車自動(dòng)尋跡實(shí)驗(yàn) 智能小車避障信息采集實(shí)驗(yàn) 1.2 物品裝卸貨系統(tǒng) 智能桁車定位控制實(shí)驗(yàn) 智能堆垛定位控制實(shí)驗(yàn) 1.3物品動(dòng)態(tài)感知顯示系統(tǒng) RFID集裝箱盤點(diǎn)實(shí)驗(yàn) 1.4 ETC收費(fèi)管理系統(tǒng) 道閘控制實(shí)驗(yàn) LED點(diǎn)陣屏顯示實(shí)驗(yàn) 1.7 智能路燈管理系統(tǒng) 智能路燈控制實(shí)驗(yàn) 2.綜合實(shí)訓(xùn) 提供基于Android系統(tǒng)的應(yīng)用開(kāi)發(fā)實(shí)訓(xùn),主要含硬件原理、傳輸協(xié)議分析、軟件開(kāi)發(fā)、及功能測(cè)試。 3.1 機(jī)械手無(wú)線控制實(shí)訓(xùn)開(kāi)發(fā) 3.2 車輛定位跟蹤實(shí)訓(xùn)開(kāi)發(fā) 3.3 貨物自動(dòng)搬運(yùn)實(shí)訓(xùn)開(kāi)發(fā) |