





- 電工電子電氣實(shí)訓(xùn)設(shè)備
- 電力電子電機(jī)實(shí)訓(xùn)裝置
- 過程控制實(shí)驗(yàn)裝置
- 工業(yè)機(jī)器人智能制造
- 維修電工實(shí)訓(xùn)設(shè)備
- PLC自動(dòng)化實(shí)訓(xùn)設(shè)備
- 數(shù)控機(jī)床實(shí)訓(xùn)考核裝置
- 數(shù)控機(jī)床機(jī)械加工設(shè)備
- 機(jī)床電氣實(shí)訓(xùn)裝置
- 光機(jī)電一體化實(shí)訓(xùn)設(shè)備
- 機(jī)械示教陳列柜
- 機(jī)械專業(yè)實(shí)驗(yàn)設(shè)備
- 傳感器檢測(cè)實(shí)驗(yàn)室設(shè)備
- 人工智能實(shí)訓(xùn)設(shè)備
- 特種作業(yè)操作實(shí)訓(xùn)考核設(shè)備
- 物聯(lián)網(wǎng)實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 消防、給排水實(shí)訓(xùn)設(shè)備
- 網(wǎng)絡(luò)布線實(shí)訓(xùn)室設(shè)備
- 電梯安裝維修實(shí)訓(xùn)考核設(shè)備
- 熱工暖通家電制冷實(shí)訓(xùn)設(shè)備
- 樓宇智能化實(shí)訓(xùn)設(shè)備
- 環(huán)境工程實(shí)驗(yàn)裝置
- 流體力學(xué)實(shí)驗(yàn)裝置
- 化工專業(yè)實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 新能源實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 電力供配電實(shí)訓(xùn)設(shè)備
- 煤礦礦山實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 液壓氣動(dòng)實(shí)驗(yàn)室設(shè)備
- 財(cái)經(jīng)類實(shí)訓(xùn)設(shè)備.軟件
- 軌道交通實(shí)驗(yàn)實(shí)訓(xùn)設(shè)備
- 船舶實(shí)訓(xùn)考核裝置
- 駕駛模擬訓(xùn)練設(shè)備
- 新能源汽車實(shí)訓(xùn)設(shè)備
- 汽車發(fā)動(dòng)機(jī)底盤實(shí)訓(xùn)臺(tái)
- 汽車電器電子實(shí)訓(xùn)臺(tái)
- 特種車工程機(jī)械實(shí)訓(xùn)設(shè)備
- 汽車虛擬仿真實(shí)訓(xùn)軟件
- 醫(yī)學(xué)教學(xué)模型
- 中小學(xué)實(shí)驗(yàn)室設(shè)備
- 實(shí)驗(yàn)箱.實(shí)驗(yàn)儀
- 模型沙盤模擬屏定制
- 儀器設(shè)備.教學(xué)掛圖
- LG-IRB04型 工業(yè)機(jī)器人綜合實(shí)訓(xùn)系統(tǒng)(雙機(jī)器人)
- LG-IRE01型 工業(yè)機(jī)器人實(shí)驗(yàn)平臺(tái)(埃夫特E3-600)
- LG-IRE03型 工業(yè)機(jī)器人模塊化綜合實(shí)訓(xùn)平臺(tái)
- LGJX-82E型 立體倉庫實(shí)訓(xùn)裝置
- LGJS-1型 現(xiàn)代物流倉儲(chǔ)自動(dòng)化實(shí)驗(yàn)系統(tǒng)
- LGJS-2型 模塊式柔性自動(dòng)環(huán)形生產(chǎn)線實(shí)驗(yàn)系統(tǒng)(工
- LG-2400型 數(shù)控模組化生產(chǎn)流水線綜合系統(tǒng)(CD制程
- LGJD-01型 光機(jī)電一體化控制實(shí)訓(xùn)裝置
- LGJD-02型 光機(jī)電一體化控制實(shí)訓(xùn)裝置
- LG-235A 光機(jī)電一體化高速分揀實(shí)訓(xùn)系統(tǒng)
- LG-XYM01型 防煙排煙系統(tǒng)控制實(shí)訓(xùn)裝置
- LG-ISFTP01型 工業(yè)機(jī)器人智能制造綜合應(yīng)用自動(dòng)化生
- LG-VRMN02型 VR汽車安全駕駛與緊急避險(xiǎn)訓(xùn)練系統(tǒng)
- LG-DTF05型 人行道扶梯技能培訓(xùn)考核實(shí)驗(yàn)裝置
- LGWL-WL02型 倉儲(chǔ)物流物聯(lián)網(wǎng)實(shí)訓(xùn)系統(tǒng)
- LGJX-82E型 立體倉庫實(shí)訓(xùn)裝置
- LGJS-1型 現(xiàn)代物流倉儲(chǔ)自動(dòng)化實(shí)驗(yàn)系統(tǒng)
- LGJS-2型 模塊式柔性自動(dòng)環(huán)形生產(chǎn)線實(shí)驗(yàn)系統(tǒng)(工
- LG-2400型 數(shù)控模組化生產(chǎn)流水線綜合系統(tǒng)(CD制程
- LGJD-01型 光機(jī)電一體化控制實(shí)訓(xùn)裝置
- LGJD-02型 光機(jī)電一體化控制實(shí)訓(xùn)裝置
- LG-235A 光機(jī)電一體化高速分揀實(shí)訓(xùn)系統(tǒng)
- LGK-III型 數(shù)控車/銑床綜合考核裝置(二合一/生產(chǎn)型
- LG-AT2型 自控原理與計(jì)算機(jī)控制實(shí)驗(yàn)儀
- LG-NLY01型 樓宇智能化工程實(shí)訓(xùn)系統(tǒng)
- LGZK-201G 自動(dòng)化綜合實(shí)訓(xùn)裝置( PLC、直流調(diào)速、觸
- LGPD-205B型 PLC、單片機(jī)及微機(jī)原理綜合實(shí)訓(xùn)裝置
- LGZK-201C 自動(dòng)化綜合實(shí)訓(xùn)裝置(PLC、變頻器)
- LGZK-201B 自動(dòng)化綜合實(shí)訓(xùn)裝置(PLC/觸摸屏)
- LGZK-201A 自動(dòng)化綜合實(shí)訓(xùn)裝置 (PLC)
- 智能交通綜合實(shí)訓(xùn)室建設(shè)方案
- 高壓供配電實(shí)訓(xùn)室設(shè)備建設(shè)方案
- 軌道交通實(shí)訓(xùn)室設(shè)備實(shí)訓(xùn)建設(shè)方案
- 焊接實(shí)訓(xùn)室工位隔斷排煙建設(shè)方案
- 自動(dòng)化控制實(shí)驗(yàn)室建設(shè)方案論證
- 電工實(shí)驗(yàn)實(shí)訓(xùn)室建設(shè)方案論證報(bào)告
- 電氣自動(dòng)化控制實(shí)訓(xùn)室建設(shè)方案
- 工業(yè)機(jī)器人1+X證書試點(diǎn)項(xiàng)目建設(shè)方案
- 消防培訓(xùn)系統(tǒng)建設(shè)方案
- 水泵拆解檢修實(shí)訓(xùn)系統(tǒng)
機(jī)器視覺教學(xué)實(shí)訓(xùn)平臺(tái)
一、平臺(tái)概述
1、平臺(tái)簡(jiǎn)介
LGAI-MV03D型 機(jī)器視覺教學(xué)實(shí)訓(xùn)平臺(tái)是面向教育培訓(xùn)領(lǐng)域所設(shè)計(jì)的一款教學(xué)實(shí)訓(xùn)平臺(tái)。
LGAI-MV03D型 機(jī)器視覺教學(xué)實(shí)訓(xùn)平臺(tái)基于3D智能相機(jī)和2D工業(yè)相機(jī),搭配多種行業(yè)應(yīng)用的真實(shí)工件和虛擬仿真的應(yīng)用場(chǎng)景,融合3D視覺系統(tǒng)調(diào)試應(yīng)用開發(fā)、2D視覺系統(tǒng)應(yīng)用技術(shù)、圖形化視覺處理技術(shù)、機(jī)器人離線編程與調(diào)試技術(shù)、深度學(xué)習(xí)等實(shí)訓(xùn)功能。
LGAI-MV03D型 機(jī)器視覺教學(xué)實(shí)訓(xùn)平臺(tái)提供配套完善的實(shí)訓(xùn)教材與培訓(xùn)視頻,能滿足視覺算法,軟件,機(jī)械,電氣以及機(jī)器人相關(guān)專業(yè)的學(xué)員,開展機(jī)器人從基礎(chǔ)示教、離線編程、到復(fù)雜視覺應(yīng)用開發(fā)等知識(shí)點(diǎn)的實(shí)驗(yàn)實(shí)訓(xùn)。
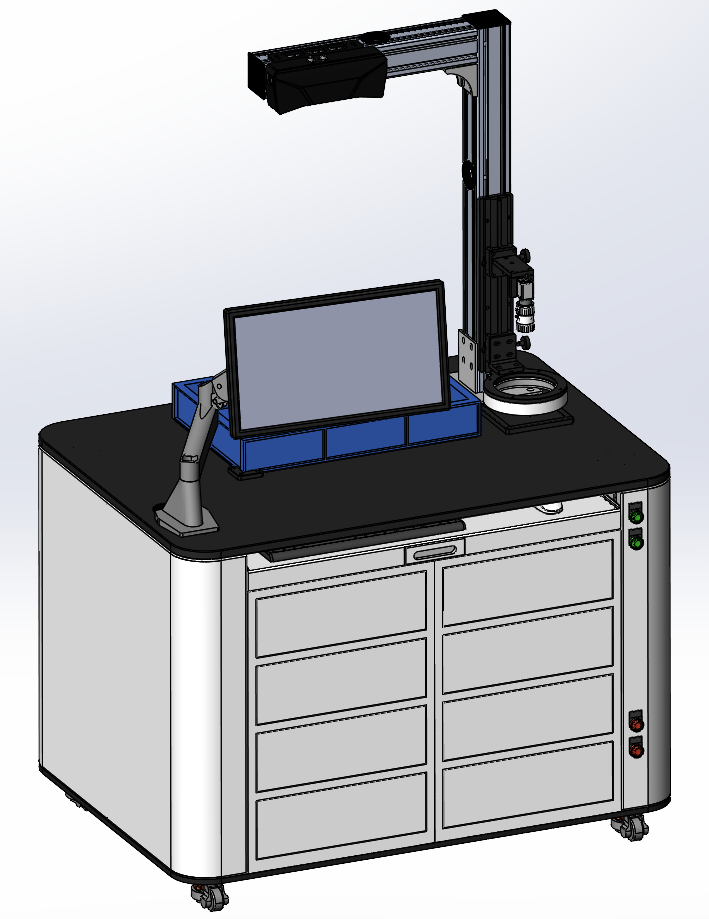
平臺(tái)模型圖

2、技術(shù)參數(shù)
輸入電源:?jiǎn)蜗嗳€220V±10% 50Hz
3D相機(jī)型號(hào):proS 700C
2D相機(jī)型號(hào):A3B00MG000
2D鏡頭型號(hào):MFA121-U25
2D光源型號(hào):CST-RS18030-B
工作環(huán)境:溫度-10℃~+40℃
相對(duì)濕度≤85%(25℃)
平臺(tái)尺寸:1170 x 830x 1700mm
安全保護(hù):具有漏電保護(hù),安全符合國家標(biāo)準(zhǔn)
3、視覺系統(tǒng)模塊
(1)工業(yè)級(jí)3D相機(jī)
①智能程度高
基于先進(jìn)的視覺算法,可處理各類工件以及紙箱、麻袋、貨品等典型物體,輕松應(yīng)對(duì)隨意堆疊、無序放置、一定程度反光、暗色等復(fù)雜工況。
②穩(wěn)定可靠
Mech-Eye工業(yè)級(jí)3D相機(jī)具備IP65防護(hù)等級(jí),可在嚴(yán)苛的環(huán)境中穩(wěn)定運(yùn)行,且已通過CE、FCC、VCCI及RoHS認(rèn)證。
③開放性強(qiáng),部署簡(jiǎn)單高效
提供多語言、多平臺(tái)的SDK選擇,接口開放,部署簡(jiǎn)單。可選擇搭配Mech-Vision、Mech-Viz使用,輕松、快速部署各類檢測(cè)/量測(cè)應(yīng)用。

3D工業(yè)相機(jī)
(2)工業(yè)級(jí)2D相機(jī)
①結(jié)構(gòu)緊湊,便于集成
尺寸為29mm*29mm*29mm,采用USB3.0數(shù)據(jù)接口,5Gbps理論傳輸寬帶,USB 接口直接供電,支持軟件觸發(fā)、硬件觸發(fā)、自由運(yùn)行等多種模式。
②開放性強(qiáng),便于拓展
兼容Windows及Linux操作系統(tǒng),支持TWAIN和DirectShow接口,SDK開發(fā)包支持VC、VB、C#、Delphi、Labview等語言,支持對(duì)接Mech-Vision、Halcon、Labview、OpenCV、Matlab等第三方軟件。

2D工業(yè)相機(jī)
(3)圖形化視覺處理軟件
完全圖形化的視覺軟件,無需編寫代碼即可完成拆垛、無序工件上料等視覺應(yīng)用。
內(nèi)置3D視覺、深度學(xué)習(xí)等前沿算法模塊,可滿足復(fù)雜多樣的應(yīng)用需求。

圖形化視覺處理軟件
(4)機(jī)器人智能編程軟件
完全圖形化的機(jī)器人智能編程環(huán)境,支持?jǐn)?shù)字孿生。
內(nèi)置軌跡規(guī)劃、碰撞檢測(cè)、混碼等智能算法,適配國內(nèi)外眾多主流品牌機(jī)器人,如ABB、KUKA、FANUC、DENSO、UR、AUBO、JAKA等。

機(jī)器人智能編程軟件
(5)機(jī)器視覺深度學(xué)習(xí)平臺(tái)軟件
包括缺陷檢測(cè)、分類、實(shí)例分割等功能,可對(duì)物體快速識(shí)別、定位、判斷物體狀態(tài)以及檢測(cè)缺陷算法。
深度學(xué)習(xí)自主訓(xùn)練工具,將深度學(xué)習(xí)模型訓(xùn)練的數(shù)據(jù)采集、篩選、導(dǎo)入、標(biāo)注、模型訓(xùn)練、驗(yàn)證及部署應(yīng)用的過程進(jìn)行全流程整合,方便自主操作,提升訓(xùn)練效率,并全程保證數(shù)據(jù)安全性。

機(jī)器視覺深度學(xué)習(xí)工作流程
二、實(shí)訓(xùn)項(xiàng)目
該平臺(tái)配備10多個(gè)實(shí)訓(xùn)項(xiàng)目的軟硬件資源,包括工程、實(shí)訓(xùn)操作文檔和培訓(xùn)視頻等。
下文以紙箱拆碼垛、電機(jī)轉(zhuǎn)子上料、鋼筋打標(biāo)計(jì)數(shù)等應(yīng)用場(chǎng)景為例做簡(jiǎn)單介紹。
1、紙箱拆碼垛
該項(xiàng)目模擬實(shí)際工業(yè)場(chǎng)景的紙箱拆碼垛。
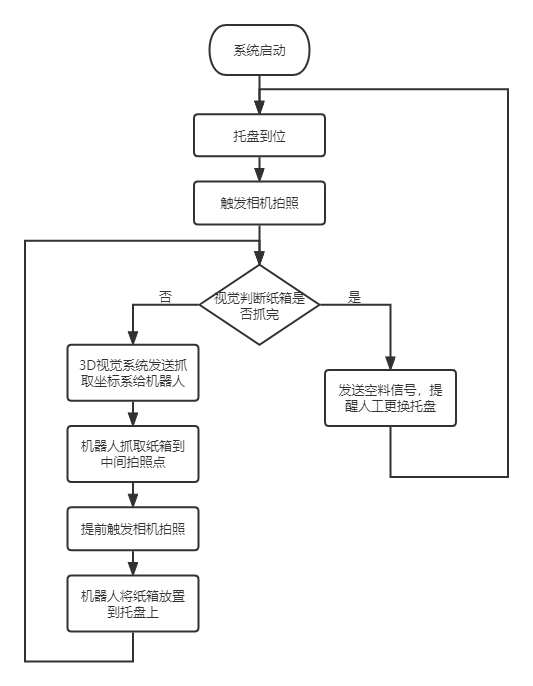
工作流程&應(yīng)用場(chǎng)景:

紙箱拆碼垛工作流程&應(yīng)用場(chǎng)景
2、電機(jī)轉(zhuǎn)子上料
該項(xiàng)目模擬實(shí)際工業(yè)場(chǎng)景的電機(jī)轉(zhuǎn)子上料。
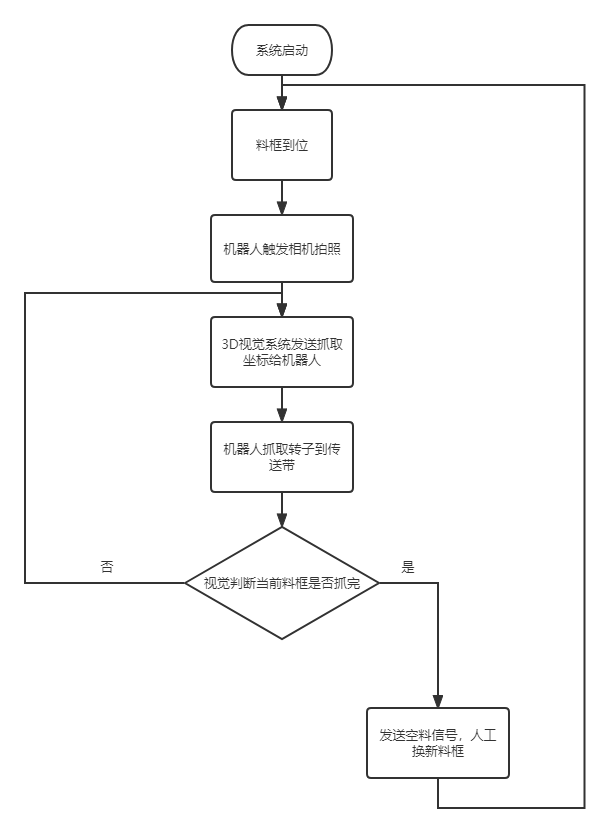
工作流程&應(yīng)用場(chǎng)景:

電機(jī)轉(zhuǎn)子上料工作流程&應(yīng)用場(chǎng)景
3、鋼筋打標(biāo)計(jì)數(shù)
該項(xiàng)目模擬實(shí)際工業(yè)場(chǎng)景的鋼筋打標(biāo)計(jì)數(shù)。
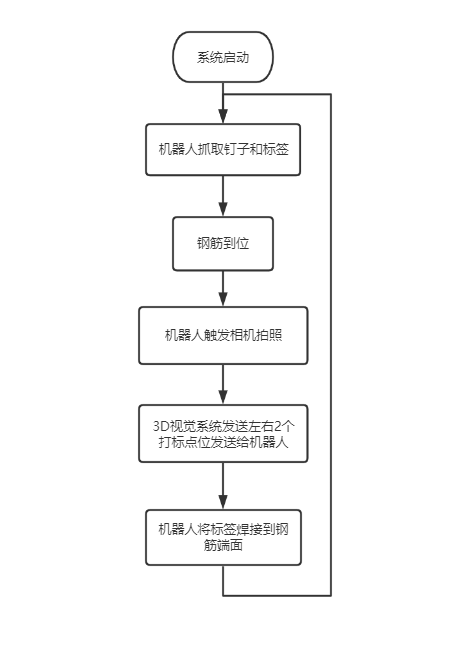
工作流程&應(yīng)用場(chǎng)景:
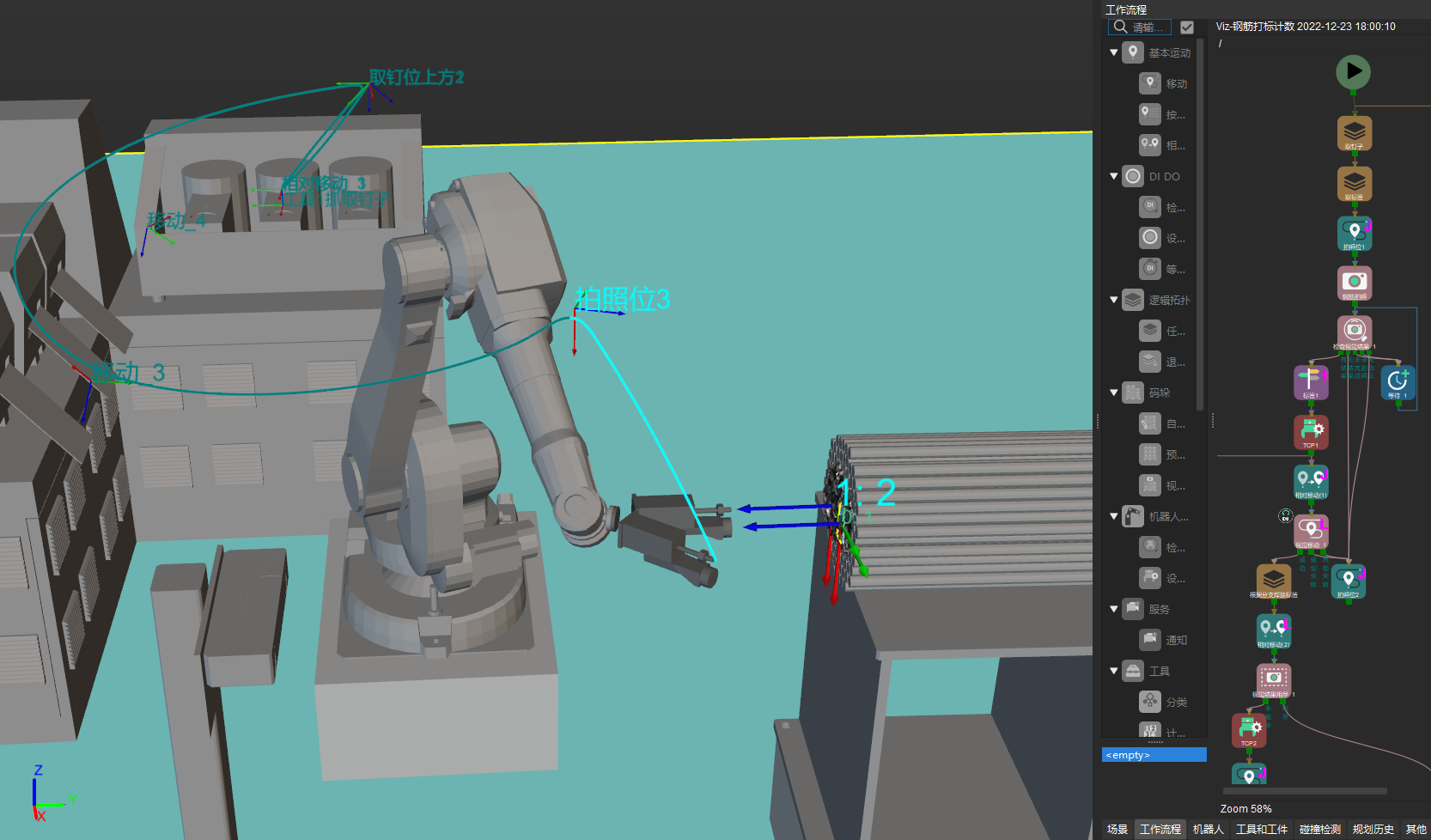
鋼筋打標(biāo)計(jì)數(shù)工作流程&應(yīng)用場(chǎng)景
三、實(shí)訓(xùn)課程
平臺(tái)可支撐和構(gòu)建的課程,涵蓋《3D視覺實(shí)操與應(yīng)用技巧》、《AI+機(jī)器視覺典型應(yīng)用案例實(shí)踐》等。
1、《3D視覺實(shí)操與應(yīng)用技巧》實(shí)訓(xùn)項(xiàng)目
|
項(xiàng)目1 安裝3D視覺系統(tǒng) |
|
任務(wù)1-1 機(jī)械安裝 |
|
任務(wù)1-2 線纜安裝 |
|
任務(wù)1-3 軟件安裝 |
|
項(xiàng)目2 采集3D相機(jī)的圖像數(shù)據(jù) |
|
任務(wù)2-1 連接相機(jī) |
|
任務(wù)2-2 配置相機(jī)參數(shù) |
|
任務(wù)2-3 保存數(shù)據(jù) |
|
項(xiàng)目3 圖像標(biāo)注和深度學(xué)習(xí)模型訓(xùn)練 |
|
任務(wù)3-1 新建DLK工程 |
|
任務(wù)3-2 算法模塊介紹 |
|
任務(wù)3-3 導(dǎo)入圖像數(shù)據(jù) |
|
任務(wù)3-4 數(shù)據(jù)集介紹 |
|
任務(wù)3-5 圖像標(biāo)注和模型訓(xùn)練 |
|
任務(wù)3-6 模型驗(yàn)證和模型應(yīng)用 |
|
項(xiàng)目4 視覺主控?zé)?/font> |
|
任務(wù)4-1 主控?zé)洔?zhǔn)備 |
|
任務(wù)4-2 主控?zé)洸僮?/font> |
|
任務(wù)4-3 主控移動(dòng)控制機(jī)器人 |
|
項(xiàng)目5 相機(jī)外參標(biāo)定 |
|
任務(wù)5-1 相機(jī)外參標(biāo)定概述 |
|
任務(wù)5-2 標(biāo)定前準(zhǔn)備 |
|
任務(wù)5-3 采用多個(gè)隨機(jī)標(biāo)定板位姿方式的ETH標(biāo)定 |
|
任務(wù)5-4 采用多個(gè)隨機(jī)標(biāo)定板位姿方式的EIH標(biāo)定 |
|
任務(wù)5-5 采用TCP尖點(diǎn)觸碰方式的ETH標(biāo)定 |
|
任務(wù)5-6 采用TCP尖點(diǎn)觸碰方式的EIH標(biāo)定 |
|
項(xiàng)目6 制作點(diǎn)云模板和添加抓取點(diǎn) |
|
任務(wù)6-1 點(diǎn)云模板和抓取點(diǎn)概述 |
|
任務(wù)6-2 生成點(diǎn)云模板 |
|
任務(wù)6-3 編輯點(diǎn)云模板 |
|
任務(wù)6-4 添加抓取點(diǎn) |
|
任務(wù)6-5 保存點(diǎn)云模板和抓取點(diǎn) |
|
項(xiàng)目7 搭建視覺工程 |
|
任務(wù)7-1 Mech-Vision軟件的基本操作 |
|
任務(wù)7-2 常用步驟介紹 |
|
任務(wù)7-3 步驟組合介紹 |
|
任務(wù)7-4 工程實(shí)戰(zhàn)——電機(jī)轉(zhuǎn)子上料的Mech-Vision工程搭建 |
|
項(xiàng)目8 搭建機(jī)器人工程 |
|
任務(wù)8-1 Mech-Viz軟件的基本操作 |
|
任務(wù)8-2 常用任務(wù)介紹 |
|
任務(wù)8-3 工程實(shí)戰(zhàn)——電機(jī)轉(zhuǎn)子上料的Mech-Viz工程搭建 |
|
項(xiàng)目9 3D視覺進(jìn)階功能 |
|
任務(wù)9-1 查看3D視覺軟件版本 |
|
任務(wù)9-2 Mech-Vision典型應(yīng)用工程介紹 |
|
任務(wù)9-3 Mech-Vision示例工程介紹 |
|
任務(wù)9-4 相機(jī)主控其它品牌機(jī)器人通訊 |
|
任務(wù)9-5 認(rèn)識(shí)標(biāo)準(zhǔn)接口 |
|
任務(wù)9-6 3D視覺隨機(jī)手冊(cè)查閱 |
2、《AI+機(jī)器視覺典型應(yīng)用案例實(shí)踐》實(shí)訓(xùn)項(xiàng)目
|
項(xiàng)目1 學(xué)前準(zhǔn)備 |
|
任務(wù)1-1 項(xiàng)目式教學(xué)概述 |
|
任務(wù)1-2 3D視覺典型應(yīng)用工作站概述 |
|
任務(wù)1-3 學(xué)習(xí)資源概述 |
|
任務(wù)1-4 本書中典型應(yīng)用工作站的使用注意事項(xiàng) |
|
項(xiàng)目2 2D視覺典型應(yīng)用——零部件缺陷檢測(cè) |
|
任務(wù)2-1 零部件缺陷檢測(cè)工作站的功能需求 |
|
任務(wù)2-2 零部件缺陷檢測(cè)工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)2-3 零部件缺陷檢測(cè)工作站的DLK工程實(shí)現(xiàn) |
|
任務(wù)2-4 零部件缺陷檢測(cè)工作站的視覺工程實(shí)現(xiàn) |
|
項(xiàng)目3 2D視覺典型應(yīng)用——零部件尺寸測(cè)量 |
|
任務(wù)3-1 零部件尺寸測(cè)量工作站的功能需求 |
|
任務(wù)3-2 零部件尺寸測(cè)量工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)3-3 零部件尺寸測(cè)量工作站的視覺工程實(shí)現(xiàn) |
|
項(xiàng)目4 3D視覺典型應(yīng)用——紙箱拆碼垛 |
|
任務(wù)4-1 紙箱拆碼垛工作站的功能需求 |
|
任務(wù)4-2 紙箱拆碼垛工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)4-3 紙箱拆碼垛工作站的視覺功能實(shí)現(xiàn) |
|
任務(wù)4-4 紙箱拆碼垛工作站的運(yùn)動(dòng)規(guī)劃功能實(shí)現(xiàn) |
|
任務(wù)4-5 紙箱拆碼垛工作站的使用注意事項(xiàng) |
|
項(xiàng)目5 3D視覺典型應(yīng)用——金屬上下料 |
|
任務(wù)5-1 金屬上下料工作站的功能需求 |
|
任務(wù)5-2 金屬上下料工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)5-3 金屬上下料工作站的視覺功能實(shí)現(xiàn) |
|
任務(wù)5-4 金屬上下料工作站的運(yùn)動(dòng)規(guī)劃功能實(shí)現(xiàn) |
|
任務(wù)5-5 金屬上下料工作站的使用注意事項(xiàng) |
|
項(xiàng)目6 3D視覺典型應(yīng)用——鋼筋打標(biāo)計(jì)數(shù) |
|
任務(wù)6-1 鋼筋打標(biāo)計(jì)數(shù)工作站的功能需求 |
|
任務(wù)6-2 鋼筋打標(biāo)計(jì)數(shù)工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)6-3 鋼筋打標(biāo)計(jì)數(shù)工作站的視覺功能實(shí)現(xiàn) |
|
任務(wù)6-4 鋼筋打標(biāo)計(jì)數(shù)工作站的運(yùn)動(dòng)規(guī)劃功能實(shí)現(xiàn) |
|
任務(wù)6-5 鋼筋打標(biāo)計(jì)數(shù)工作站的使用注意事項(xiàng) |
|
項(xiàng)目7 3D視覺典型應(yīng)用——商超分揀 |
|
任務(wù)7-1 商超分揀工作站的功能需求 |
|
任務(wù)7-2 商超分揀工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)7-3 商超分揀工作站的視覺功能實(shí)現(xiàn) |
|
任務(wù)7-4 商超分揀工作站的運(yùn)動(dòng)規(guī)劃功能實(shí)現(xiàn) |
|
任務(wù)7-5 商超分揀工作站的使用注意事項(xiàng) |
|
項(xiàng)目8 3D視覺典型應(yīng)用——鋼板開坡口 |
|
任務(wù)8-1 鋼板開坡口工作站的功能需求 |
|
任務(wù)8-2 鋼板開坡口工作站的系統(tǒng)實(shí)現(xiàn)流程 |
|
任務(wù)8-3 鋼板開坡口工作站的視覺功能實(shí)現(xiàn) |
|
任務(wù)8-4 鋼板開坡口工作站的運(yùn)動(dòng)規(guī)劃功能實(shí)現(xiàn) |
|
任務(wù)8-5 鋼板開坡口工作站的使用注意事項(xiàng) |