





產(chǎn)品分類
- 電工電子電氣實訓(xùn)設(shè)備
- 電力電子電機實訓(xùn)裝置
- 過程控制實驗裝置
- 工業(yè)機器人智能制造
- 維修電工實訓(xùn)設(shè)備
- PLC自動化實訓(xùn)設(shè)備
- 數(shù)控機床實訓(xùn)考核裝置
- 數(shù)控機床機械加工設(shè)備
- 機床電氣實訓(xùn)裝置
- 機電一體化實訓(xùn)設(shè)備
- 機械示教陳列柜
- 機械專業(yè)實驗設(shè)備
- 傳感器檢測實驗室設(shè)備
- 工業(yè)互聯(lián)人工智能實訓(xùn)設(shè)備
- 特種作業(yè)操作實訓(xùn)考核設(shè)備
- 物聯(lián)網(wǎng)實驗實訓(xùn)設(shè)備
- 消防、給排水實訓(xùn)設(shè)備
- 網(wǎng)絡(luò)布線實訓(xùn)室設(shè)備
- 電梯安裝維修實訓(xùn)考核設(shè)備
- 熱工暖通家電制冷實訓(xùn)設(shè)備
- 樓宇智能化實訓(xùn)設(shè)備
- 環(huán)境工程實驗裝置
- 流體力學(xué)實驗裝置
- 化工專業(yè)實驗實訓(xùn)設(shè)備
- 新能源實驗實訓(xùn)設(shè)備
- 電力供配電實訓(xùn)設(shè)備
- 煤礦礦山實驗實訓(xùn)設(shè)備
- 液壓氣動實驗室設(shè)備
- 教學(xué)仿真軟件
- 軌道交通實驗實訓(xùn)設(shè)備
- 船舶實訓(xùn)考核裝置
- 駕駛模擬訓(xùn)練設(shè)備
- 新能源汽車實訓(xùn)設(shè)備
- 汽車發(fā)動機底盤實訓(xùn)臺
- 汽車電器電子實訓(xùn)臺
- 特種車工程機械實訓(xùn)設(shè)備
- 智能網(wǎng)聯(lián)汽車實訓(xùn)設(shè)備
- 醫(yī)學(xué)教學(xué)模型
- 中小學(xué)實驗室設(shè)備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設(shè)備.教學(xué)掛圖
更多新產(chǎn)品
- LG-TSV05型智能網(wǎng)聯(lián)自動駕駛微縮車
- LG-ITP02型智能網(wǎng)聯(lián)汽車視覺識別實訓(xùn)臺
- LG-IH05型智能網(wǎng)聯(lián)汽車超聲波雷達便攜式實驗箱
- LG-ITP03型智能網(wǎng)聯(lián)汽車激光雷達實訓(xùn)臺
- LG-IH04型智能網(wǎng)聯(lián)汽車組合導(dǎo)航系統(tǒng)便攜式實驗箱
- LG-IH01型智能網(wǎng)聯(lián)汽車毫米波雷達便攜式實驗箱
- LG-IKP013型智能網(wǎng)聯(lián)汽車決策規(guī)劃仿真實訓(xùn)臺
- LG-TSV07型智能網(wǎng)聯(lián)乘用車高級開發(fā)教學(xué)平臺
- LG-TSV10型智能網(wǎng)聯(lián)車路協(xié)同智慧燈桿
- LG-TSV08型智能網(wǎng)聯(lián)微縮車平行駕駛系統(tǒng)
- LG-TSV11型智能網(wǎng)聯(lián)車路協(xié)同沙盤及云控平臺
- LG-IZC02型智能網(wǎng)聯(lián)自動駕駛小巴(8座 荷載15人)
- LG-JXY014型機械傳動與液壓控制實訓(xùn)平臺
- LG-JXY012型工業(yè)機械傳動與液壓調(diào)試平臺
- LGY-JD011型機電液一體化智能綜合實訓(xùn)平臺(液壓
更多熱點產(chǎn)品
- LG-DLK01型 電力系統(tǒng)綜合自動化實驗平臺
- LG系列 智能建筑實驗實訓(xùn)裝置
- LGJS-3型 模塊式柔性環(huán)形自動生產(chǎn)線及工業(yè)機器人
- LGJX-82E型 立體倉庫實訓(xùn)裝置
- LGJS-1型 現(xiàn)代物流倉儲自動化實驗系統(tǒng)
- LGJS-2型 模塊式柔性自動環(huán)形生產(chǎn)線實驗系統(tǒng)(工
- LG-2400型 數(shù)控模組化生產(chǎn)流水線綜合系統(tǒng)(CD制程
- LGJD-01型 光機電一體化控制實訓(xùn)裝置
- LGJD-02型 光機電一體化控制實訓(xùn)裝置
- LG-235A 光機電一體化高速分揀實訓(xùn)系統(tǒng)
- LGK-III型 數(shù)控車/銑床綜合考核裝置(二合一/生產(chǎn)型
- LG-AT2型 自控原理與計算機控制實驗儀
- LG-NLY01型 樓宇智能化工程實訓(xùn)系統(tǒng)
- LGZK-201G 自動化綜合實訓(xùn)裝置( PLC、直流調(diào)速、觸
- LGPD-205B型 PLC、單片機及微機原理綜合實訓(xùn)裝置
當(dāng)前位置:首頁 > 產(chǎn)品展示 > 高教職教設(shè)備 > PLC自動化實訓(xùn)設(shè)備 > PLC自動化實訓(xùn)設(shè)備
LG-EWK03型 二維運動控制實驗平臺(單片機控制)
品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
一、概述
LG-EWK03型 二維運動控制實驗平臺(單片機控制)是集運動控制卡、單片機開發(fā)控制板、步進電機及驅(qū)動器、開關(guān)電源、XY控制平臺及運動控制軟件于一體的理想教學(xué)實驗系統(tǒng)。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現(xiàn)平面內(nèi)X、Y軸方向的運動控制,用于實現(xiàn)目標(biāo)軌跡和動作。實驗系統(tǒng)軟件包括基于軸的控制、基于坐標(biāo)系的控制、命令編輯和運行、數(shù)控代碼編輯和運行、復(fù)雜運動軌跡控制。
 二、技術(shù)性能
二、技術(shù)性能
1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;*大運動速度:20mm/s;*大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環(huán)境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×75cm
三、系統(tǒng)結(jié)構(gòu)及組成
LG-EWK03型 二維運動控制實驗平臺主要由步進電機控制系統(tǒng)和電腦桌兩部分組成,結(jié)構(gòu)框圖如下圖所示:
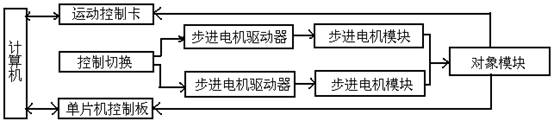
系統(tǒng)結(jié)構(gòu)框圖
(1)對象模塊
步進電機二個:采用二個2相步進電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
(2)51單片機開發(fā)控制板
單片機開發(fā)控制板,主CPU為AT89S52,帶下載接口(編程電纜,編程軟件),所有接口資源引出,供用戶使用。并配置相應(yīng)控制開關(guān)按鈕。
(3)運動控制卡一塊
32位PCI總線,即插即用
所有輸入、輸出均采用光耦隔離,抗干擾性強
2軸伺服/步進電機控制,每軸可獨立運動,互不影響
脈沖輸出的頻率誤差小于0.1%
*大脈沖輸出頻率為2MHz
脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
梯形加/減速
任意2軸直線插補
*大插補速度1MHz
運動中可以實時讀出邏輯位置、實際位置、驅(qū)動速度
24路數(shù)字輸入,12路輸出
每軸兩個限位輸入,可設(shè)置成無效,作為通用輸入使用
支持在一個系統(tǒng)中使用多達16個控制卡
支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統(tǒng)
(4)步進電機驅(qū)動器二個
輸出電流:*大電流為2A
輸出方式:光光耦合器·開路集電極輸出
(5)穩(wěn)壓直流電源 一個
輸出電流:*大輸出電流為5A
輸出電壓:24V
輸出功率:120w
(6)運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據(jù)自己的需要進行相應(yīng)的接線,實現(xiàn)接線的靈活及開放性。
(7)實驗平臺信號接口板 一塊
用以實現(xiàn)PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
(8)腦桌一張(選配)
(9)計算機一臺(用戶自備)
用于安裝單片機集成開發(fā)環(huán)境KEIL C、編程下載軟件,主要完成程序的編寫、修改、編譯、軟件仿真等功能,*后通過編程下載軟件裝載到單片機內(nèi)部FLASH ROM中運行。還用于運行控制卡上位軟件的開發(fā)、運行。
硬件配置:基本配置要求P4 3.OG以上,內(nèi)存至少為256M,至少有一個USB接口、一個并行口、一個Rs232串口和一個空閑PCI插槽。操作系統(tǒng):Windows XP(專業(yè)版)+SP2。
四、實驗項目
(一)基礎(chǔ)實驗
1、單片機的認(rèn)識和操作實驗
2、單片機集成開發(fā)環(huán)境KEIL C的認(rèn)識實驗
3、單片機在線編程軟件的認(rèn)識與使用
4、單片機基本編程練習(xí)實驗
(二)基于51單片機控制的系統(tǒng)性實驗
6、基于51單片機控制的單軸實驗
7、基于51單片機控制的兩軸聯(lián)動控制實驗
8、基于51單片機控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統(tǒng)性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯(lián)動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發(fā)工具:
1、CBuilder Borland C++Bulider 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
3、Vb Microsoft Visual basic工具開發(fā)的基本庫函數(shù)示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
關(guān)鍵詞: 數(shù)控車床 實訓(xùn)設(shè)備 實訓(xùn)裝置 教學(xué)儀器 教學(xué)設(shè)備 實驗設(shè)備 實訓(xùn)臺 考核裝置 電工電子 實驗裝置 數(shù)控技術(shù) 實訓(xùn)考核 技能實訓(xùn) 數(shù)控系統(tǒng) 電氣控制 實訓(xùn)鑒定 自控實訓(xùn) 數(shù)控軟件 實驗系統(tǒng) 數(shù)控實訓(xùn) 電氣技術(shù) 數(shù)控設(shè)備 數(shù)控銑床 高教設(shè)備 教學(xué)車床 職教設(shè)備 PLC控制 PLC技術(shù) PLC實驗 變頻調(diào)速
LG-EWK03型 二維運動控制實驗平臺(單片機控制)是集運動控制卡、單片機開發(fā)控制板、步進電機及驅(qū)動器、開關(guān)電源、XY控制平臺及運動控制軟件于一體的理想教學(xué)實驗系統(tǒng)。XY控制臺是一個采用滾珠絲杠傳動的模塊化十字工作臺,可以實現(xiàn)平面內(nèi)X、Y軸方向的運動控制,用于實現(xiàn)目標(biāo)軌跡和動作。實驗系統(tǒng)軟件包括基于軸的控制、基于坐標(biāo)系的控制、命令編輯和運行、數(shù)控代碼編輯和運行、復(fù)雜運動軌跡控制。
1、定位精度:0.4mm
2、X軸有效行程:230mm;Y軸有效行程:230mm;*大運動速度:20mm/s;*大運動加速度:1g
3、輸入電源:220V±10%(50Hz)
4、工作環(huán)境:溫度-10℃~+40℃ 相對濕度<85%(25℃) 海拔<4000m
5、裝置容量:≤1.2kVA
6、外形尺寸:45cm×45cm×75cm
三、系統(tǒng)結(jié)構(gòu)及組成
LG-EWK03型 二維運動控制實驗平臺主要由步進電機控制系統(tǒng)和電腦桌兩部分組成,結(jié)構(gòu)框圖如下圖所示:
系統(tǒng)結(jié)構(gòu)框圖
步進電機二個:采用二個2相步進電動機,分別為XY兩個方向布置,X軸運動行程為230mm,Y軸運動行程為230mm。
(2)51單片機開發(fā)控制板
單片機開發(fā)控制板,主CPU為AT89S52,帶下載接口(編程電纜,編程軟件),所有接口資源引出,供用戶使用。并配置相應(yīng)控制開關(guān)按鈕。
(3)運動控制卡一塊
32位PCI總線,即插即用
所有輸入、輸出均采用光耦隔離,抗干擾性強
2軸伺服/步進電機控制,每軸可獨立運動,互不影響
脈沖輸出的頻率誤差小于0.1%
*大脈沖輸出頻率為2MHz
脈沖輸出可用單脈沖(脈沖+方向)或雙脈沖(脈沖+脈沖)方式
梯形加/減速
任意2軸直線插補
*大插補速度1MHz
運動中可以實時讀出邏輯位置、實際位置、驅(qū)動速度
24路數(shù)字輸入,12路輸出
每軸兩個限位輸入,可設(shè)置成無效,作為通用輸入使用
支持在一個系統(tǒng)中使用多達16個控制卡
支持DOS、WINDOWS95/98/NT/2000/XP/WINCE等操作系統(tǒng)
(4)步進電機驅(qū)動器二個
輸出電流:*大電流為2A
輸出方式:光光耦合器·開路集電極輸出
(5)穩(wěn)壓直流電源 一個
輸出電流:*大輸出電流為5A
輸出電壓:24V
輸出功率:120w
(6)運動控制卡接口板 一塊
為運動控制卡提供接口端子,可根據(jù)自己的需要進行相應(yīng)的接線,實現(xiàn)接線的靈活及開放性。
(7)實驗平臺信號接口板 一塊
用以實現(xiàn)PLC和運動控制卡與實驗平臺的信號連接,在同一時刻只能一種控制起作用。
(8)腦桌一張(選配)
(9)計算機一臺(用戶自備)
用于安裝單片機集成開發(fā)環(huán)境KEIL C、編程下載軟件,主要完成程序的編寫、修改、編譯、軟件仿真等功能,*后通過編程下載軟件裝載到單片機內(nèi)部FLASH ROM中運行。還用于運行控制卡上位軟件的開發(fā)、運行。
硬件配置:基本配置要求P4 3.OG以上,內(nèi)存至少為256M,至少有一個USB接口、一個并行口、一個Rs232串口和一個空閑PCI插槽。操作系統(tǒng):Windows XP(專業(yè)版)+SP2。
四、實驗項目
(一)基礎(chǔ)實驗
1、單片機的認(rèn)識和操作實驗
2、單片機集成開發(fā)環(huán)境KEIL C的認(rèn)識實驗
3、單片機在線編程軟件的認(rèn)識與使用
4、單片機基本編程練習(xí)實驗
(二)基于51單片機控制的系統(tǒng)性實驗
6、基于51單片機控制的單軸實驗
7、基于51單片機控制的兩軸聯(lián)動控制實驗
8、基于51單片機控制的任意路線物料搬運實驗
(三)基于運動控制卡控制的系統(tǒng)性實驗
9、基于運動控制卡控制的單軸實驗
10、基于運動控制卡控制的兩軸聯(lián)動實驗
11、基于運動控制卡控制的任意路線物料搬運實驗
五、運動控制卡可用以下開發(fā)工具:
1、CBuilder Borland C++Bulider 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
2、Dephi Borland Dephi 6 工具開發(fā)的基本庫函數(shù)示例程序及源代碼
3、Vb Microsoft Visual basic工具開發(fā)的基本庫函數(shù)示例程序及源代碼
4、VC Microsoft Visual C++ 工具開發(fā)的基本庫函數(shù)示例程序及源代碼