





產(chǎn)品分類
- 電工電子電氣實訓(xùn)設(shè)備
- 電力電子電機實訓(xùn)裝置
- 過程控制實驗裝置
- 工業(yè)機器人智能制造
- 維修電工實訓(xùn)設(shè)備
- PLC自動化實訓(xùn)設(shè)備
- 數(shù)控機床實訓(xùn)考核裝置
- 數(shù)控機床機械加工設(shè)備
- 機床電氣實訓(xùn)裝置
- 機電一體化實訓(xùn)設(shè)備
- 機械示教陳列柜
- 機械專業(yè)實驗設(shè)備
- 傳感器檢測實驗室設(shè)備
- 工業(yè)互聯(lián)人工智能實訓(xùn)設(shè)備
- 特種作業(yè)操作實訓(xùn)考核設(shè)備
- 物聯(lián)網(wǎng)實驗實訓(xùn)設(shè)備
- 消防、給排水實訓(xùn)設(shè)備
- 網(wǎng)絡(luò)布線實訓(xùn)室設(shè)備
- 電梯安裝維修實訓(xùn)考核設(shè)備
- 熱工暖通家電制冷實訓(xùn)設(shè)備
- 樓宇智能化實訓(xùn)設(shè)備
- 環(huán)境工程實驗裝置
- 流體力學(xué)實驗裝置
- 化工專業(yè)實驗實訓(xùn)設(shè)備
- 新能源實驗實訓(xùn)設(shè)備
- 電力供配電實訓(xùn)設(shè)備
- 煤礦礦山實驗實訓(xùn)設(shè)備
- 液壓氣動實驗室設(shè)備
- 教學(xué)仿真軟件
- 軌道交通實驗實訓(xùn)設(shè)備
- 船舶實訓(xùn)考核裝置
- 駕駛模擬訓(xùn)練設(shè)備
- 新能源汽車實訓(xùn)設(shè)備
- 汽車發(fā)動機底盤實訓(xùn)臺
- 汽車電器電子實訓(xùn)臺
- 特種車工程機械實訓(xùn)設(shè)備
- 智能網(wǎng)聯(lián)汽車實訓(xùn)設(shè)備
- 醫(yī)學(xué)教學(xué)模型
- 中小學(xué)實驗室設(shè)備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設(shè)備.教學(xué)掛圖
更多新產(chǎn)品
- LG-TSV05型智能網(wǎng)聯(lián)自動駕駛微縮車
- LG-ITP02型智能網(wǎng)聯(lián)汽車視覺識別實訓(xùn)臺
- LG-IH05型智能網(wǎng)聯(lián)汽車超聲波雷達便攜式實驗箱
- LG-ITP03型智能網(wǎng)聯(lián)汽車激光雷達實訓(xùn)臺
- LG-IH04型智能網(wǎng)聯(lián)汽車組合導(dǎo)航系統(tǒng)便攜式實驗箱
- LG-IH01型智能網(wǎng)聯(lián)汽車毫米波雷達便攜式實驗箱
- LG-IKP013型智能網(wǎng)聯(lián)汽車決策規(guī)劃仿真實訓(xùn)臺
- LG-TSV07型智能網(wǎng)聯(lián)乘用車高級開發(fā)教學(xué)平臺
- LG-TSV10型智能網(wǎng)聯(lián)車路協(xié)同智慧燈桿
- LG-TSV08型智能網(wǎng)聯(lián)微縮車平行駕駛系統(tǒng)
- LG-TSV11型智能網(wǎng)聯(lián)車路協(xié)同沙盤及云控平臺
- LG-IZC02型智能網(wǎng)聯(lián)自動駕駛小巴(8座 荷載15人)
- LG-JXY014型機械傳動與液壓控制實訓(xùn)平臺
- LG-JXY012型工業(yè)機械傳動與液壓調(diào)試平臺
- LGY-JD011型機電液一體化智能綜合實訓(xùn)平臺(液壓
更多熱點產(chǎn)品
- LG-DLK01型 電力系統(tǒng)綜合自動化實驗平臺
- LG系列 智能建筑實驗實訓(xùn)裝置
- LGJS-3型 模塊式柔性環(huán)形自動生產(chǎn)線及工業(yè)機器人
- LGJX-82E型 立體倉庫實訓(xùn)裝置
- LGJS-1型 現(xiàn)代物流倉儲自動化實驗系統(tǒng)
- LGJS-2型 模塊式柔性自動環(huán)形生產(chǎn)線實驗系統(tǒng)(工
- LG-2400型 數(shù)控模組化生產(chǎn)流水線綜合系統(tǒng)(CD制程
- LGJD-01型 光機電一體化控制實訓(xùn)裝置
- LGJD-02型 光機電一體化控制實訓(xùn)裝置
- LG-235A 光機電一體化高速分揀實訓(xùn)系統(tǒng)
- LGK-III型 數(shù)控車/銑床綜合考核裝置(二合一/生產(chǎn)型
- LG-AT2型 自控原理與計算機控制實驗儀
- LG-NLY01型 樓宇智能化工程實訓(xùn)系統(tǒng)
- LGZK-201G 自動化綜合實訓(xùn)裝置( PLC、直流調(diào)速、觸
- LGPD-205B型 PLC、單片機及微機原理綜合實訓(xùn)裝置
當(dāng)前位置:首頁 > 新聞資訊 > 行業(yè)動態(tài) > 行業(yè)動態(tài)
工業(yè)機器人工程考核實訓(xùn)系統(tǒng)
一、系統(tǒng)介紹
1、系統(tǒng)組成
LG-BWL06型 工業(yè)機器人工程考核實訓(xùn)系統(tǒng)主要由碼垛機立庫系統(tǒng)、AGV小車、托盤流水線、物品盒流水線、視覺系統(tǒng)、六自由度工業(yè)機器人組成,如下圖1-1所示。
(1) 碼垛機立庫系統(tǒng),用于存儲物品托盤,并且按照要求碼垛機完成出庫和入庫;
(2) AGV小車,用于把安裝有物品的托盤從碼垛機立庫系統(tǒng)對接為,沿鋪設(shè)的磁條運行到托盤流水線;
(3) 托盤流水線,負責(zé)把貨品托盤輸送到視覺檢測工位,經(jīng)視覺定位識別輸送到抓取工位;
(4) 物品盒流水線,負責(zé)成品物品盒的裝箱及傳送;
(5) 視覺系統(tǒng),對托盤流水線上的托盤上的物品進行識別,并把識別結(jié)果發(fā)送至主控系統(tǒng)的PLC;
(6) 六自由度工業(yè)機器人系統(tǒng),根據(jù)主控系統(tǒng) PLC 發(fā)送的數(shù)據(jù),對托盤流水線上的托盤上的物品進行分揀,放置于物品盒流水線上的指定物品盒中,同時把空托盤放置于空托盤庫中。
機器人工程考核實訓(xùn)系統(tǒng)")
本系統(tǒng)再現(xiàn)工業(yè)現(xiàn)場從倉儲、搬運、分揀以及包裝的全過程,將目前工業(yè)自動化現(xiàn)場前沿的實用技術(shù)和方案引入到比賽當(dāng)中,通過比賽,讓學(xué)生能熟練掌握自動化科技的前沿應(yīng)用技術(shù),為我國從制造大國發(fā)展到制造強國,為工業(yè)智能制造培養(yǎng)一批有素質(zhì),能干活,干好活的新一代職業(yè)能手。
(1) 選用6軸關(guān)節(jié)型工業(yè)機器人+堆垛直角坐標(biāo)機器人+AGV移動機器人,該三種機器人都是目前工業(yè)現(xiàn)場應(yīng)用比較廣泛的機器人;——切合工業(yè)現(xiàn)場,體現(xiàn)機器人的多樣性;
(2) 將立體倉庫(碼垛機器人)+工件運輸(AGV機器人)+檢測分揀(機器視覺)+機器人自動分揀裝配(6軸機器人)+自動回收+自動包裝完美的融合。——詮釋智能工廠和智能物流的概念;
(3) 設(shè)置多物件和多工位+多倉儲,可以展現(xiàn)出非常多的組合場景, 不僅可以展現(xiàn)學(xué)生的控制系統(tǒng)和機器人的編程能力,同時也能展現(xiàn)學(xué)生的流程規(guī)劃策略和優(yōu)化能力;——真實展示實際工業(yè)和物流系統(tǒng)場景,非常適合于實訓(xùn)和比賽。
(4) 整個系統(tǒng)采用網(wǎng)絡(luò)化控制構(gòu)架,以及最新的控制系統(tǒng)。——學(xué)生能夠了解先進的控制技術(shù)以及編程方法。
3、工作流程
機器人工程考核實訓(xùn)系統(tǒng)") 基本運行流程描述:
基本運行流程描述:
(1) 物品以托盤形式存儲在原料倉庫中(物品共有 8 種不同形狀高度的樣式,每個托盤上隨機放置 0-3 個物品,樣式也隨機,可能相同,也可能不同)。
(2) 物品隨托盤從碼垛機立庫出庫,由AGV 小車搬輸送至托盤流水線;
(3) 托盤在托盤流水線的 4 號工位停止,通過智能相機識別物品數(shù)量、類型、相對于標(biāo)定原點的位置、相對于標(biāo)定姿態(tài)的旋轉(zhuǎn)角度并傳輸給PLC;
(4) 識別完成后,托盤流水線把托盤傳輸?shù)?nbsp;1 號位置后停止;
(5) 主控系統(tǒng)把需要分揀物品的 XYZ 坐標(biāo)偏移和旋轉(zhuǎn)角度通過MODBUS TCP 協(xié)議依次發(fā)送給六自由度工業(yè)機器人系統(tǒng),六自由度工業(yè)機器人機器人按照事先編寫的程序流程,執(zhí)行抓取分揀;
(6) 六自由度工業(yè)機器人根據(jù)放置位置的XYZ 坐標(biāo)偏移和旋轉(zhuǎn)角度把物品放入禮品箱中。(禮品箱有 8 個格子,相同的工件放到同一
個格子,每個格子最多放 2 件物品。碼垛部分偏移運算由主控系統(tǒng)計算,整合到Z 軸偏移中給六自由度工業(yè)機器人)。
(7) 把物品取完后,六自由度工業(yè)機器人把空托盤也搬運放置到空托盤庫中。
(8) 物品裝滿物品箱后,流轉(zhuǎn)到下料碼垛區(qū)。(每個比賽區(qū)不會 使用全部物品樣式,應(yīng)取其中 2-3 種。當(dāng)中轉(zhuǎn)箱裝滿或物品無法按照規(guī)則放入物品箱時流入下一區(qū)域);
(9)當(dāng)物品箱碼到一定數(shù)量或原料出庫完成任務(wù)時停止比賽。
二、設(shè)備安裝
1、設(shè)備安裝
本設(shè)備共包括:工業(yè)機器人及控制柜、PLC 控制柜、托盤流水線、物品盒擺放流水線、AGV 小車等。比賽所用場地為 4m×8m,如圖 2-1 所示為裝備之間的大致布局,現(xiàn)場安裝時并不一定嚴格按照圖中所標(biāo)尺寸安裝,允許有所變動。在安裝時需要注意以下事項:
(1) 調(diào)節(jié)工業(yè)機器人安裝底座的四個地腳,使工業(yè)機器人的安裝底座水平;(水平儀)
(2) 調(diào)節(jié)托盤流水線和物品盒擺放流水線的水平;(水平儀)
(3) 以工業(yè)機器人為基準(zhǔn),確保托盤流水線與工業(yè)機器人的 Y 軸方向平行,確保物品盒擺放流水線與工業(yè)機器人的 X 軸方向平行;(具體調(diào)節(jié)方式見節(jié) 2.2)
(4) 確保托盤流水線前端滑輪的平切面低于AGV 小車的平帶面;(見圖 2-2)。
(5) 確保智能相機與托盤流水線垂直。(見圖 2-3)
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)")
如圖 2-4 所示,在工業(yè)機器人末端夾具上安裝了一個激光筆,具體調(diào)節(jié)步驟如下:
(1) 利用工業(yè)機器人的工具坐標(biāo)系調(diào)整機器人的姿態(tài),使得激光筆始終垂直于工業(yè)機器人的安裝基面;
(2)首先控制工業(yè)機器人運動到托盤流水線上方合適的高度,將激光筆發(fā)出的激光對準(zhǔn)流水線架上的鋁型材邊線,利用機器人的工具坐標(biāo)系,使機器人沿著基坐標(biāo)系的 Y 方向運動(注意降低機器人的運動速度),注意觀察激光是否偏離鋁型材邊線,并作適當(dāng)調(diào)整。
(3)利用同樣的方法調(diào)整物品擺放流水線,只是使機器人沿著坐標(biāo)系的X 方向運動。
機器人工程考核實訓(xùn)系統(tǒng)")
6 自由度關(guān)節(jié)型機器人,如下圖 3.1 所示。6 個自由度,最大負荷 20KG,臂展>1.5m。
工業(yè)機器人在系統(tǒng)中的位置如下圖 3.2 所示。
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)") 四、 視覺識別系統(tǒng)
四、 視覺識別系統(tǒng)
本系統(tǒng)安裝于托盤流水線中,當(dāng)托盤貨物到視覺檢測工位時, X-SIGHT 機器視覺系統(tǒng)對托盤內(nèi)的貨物進行視覺識別,并把識別的位置,形狀等特征數(shù)據(jù)給到中央控制器和六關(guān)節(jié)機器人,由機械人根據(jù)目標(biāo)存放位置執(zhí)行相應(yīng)的動作。
機器人工程考核實訓(xùn)系統(tǒng)")
1、托盤流水線
負責(zé)把貨品托盤輸送到視覺檢測工位,經(jīng)視覺定位識別輸送到抓取工位,由機械手將托盤中的貨品,通過真空吸盤吸放到相應(yīng)物品盒中。當(dāng)貨品托盤中的貨物全部取空時,由機械手通過另一套真空吸盤將托盤吸放到空托盤存放處。
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)")
機器人工程考核實訓(xùn)系統(tǒng)")
物品盒流水線采用板鏈結(jié)構(gòu),負責(zé)成品物品盒的裝箱及傳送,為5工位流水線,裝在3個物品盒(占用3個工位)。
機器人工程考核實訓(xùn)系統(tǒng)")
圖 5.4 物品盒流水線效果圖
機器人工程考核實訓(xùn)系統(tǒng)")
如圖所示,從左到右設(shè)為1-5工位,當(dāng)前物品盒處于2 、3 、4工位,定義為物品盒A、B、C,機械手裝載3號工位的物品盒,即B物 品盒。如果需要裝載A物品盒,則流水線傳送機構(gòu)動作右移,當(dāng)右檢測物品盒傳感器接通時,流水線停止運行,此時機械手裝載A物品盒。如果下一個要裝載的是C物品盒,則流水線向左運行,碰到左面物品盒檢測傳感器時停止運行。系統(tǒng)中另設(shè)有零位檢測傳感器,以檢測物品盒處于中間工位。為防止物品盒滑落,在左右極限位置設(shè)有左右限位開關(guān),以防止控制失誤,致物品盒跌落。
物品盒流水線由步進電機控制,實際控制策略可以采用脈沖定位控制的方式。
六、 電氣控制系統(tǒng)
本系統(tǒng)采用國際上先進的控制理念和最新的控制產(chǎn)品,采用網(wǎng)絡(luò)化控制模式,系統(tǒng)主要控制框圖如 6.1 所示。
關(guān)鍵詞: 數(shù)控車床 實訓(xùn)設(shè)備 實訓(xùn)裝置 教學(xué)儀器 教學(xué)設(shè)備 實驗設(shè)備 實訓(xùn)臺 考核裝置 電工電子 實驗裝置 數(shù)控技術(shù) 實訓(xùn)考核 技能實訓(xùn) 數(shù)控系統(tǒng) 電氣控制 實訓(xùn)鑒定 自控實訓(xùn) 數(shù)控軟件 實驗系統(tǒng) 數(shù)控實訓(xùn) 電氣技術(shù) 數(shù)控設(shè)備 數(shù)控銑床 高教設(shè)備 教學(xué)車床 職教設(shè)備 PLC控制 PLC技術(shù) PLC實驗 變頻調(diào)速
1、系統(tǒng)組成
LG-BWL06型 工業(yè)機器人工程考核實訓(xùn)系統(tǒng)主要由碼垛機立庫系統(tǒng)、AGV小車、托盤流水線、物品盒流水線、視覺系統(tǒng)、六自由度工業(yè)機器人組成,如下圖1-1所示。
(1) 碼垛機立庫系統(tǒng),用于存儲物品托盤,并且按照要求碼垛機完成出庫和入庫;
(2) AGV小車,用于把安裝有物品的托盤從碼垛機立庫系統(tǒng)對接為,沿鋪設(shè)的磁條運行到托盤流水線;
(3) 托盤流水線,負責(zé)把貨品托盤輸送到視覺檢測工位,經(jīng)視覺定位識別輸送到抓取工位;
(4) 物品盒流水線,負責(zé)成品物品盒的裝箱及傳送;
(5) 視覺系統(tǒng),對托盤流水線上的托盤上的物品進行識別,并把識別結(jié)果發(fā)送至主控系統(tǒng)的PLC;
(6) 六自由度工業(yè)機器人系統(tǒng),根據(jù)主控系統(tǒng) PLC 發(fā)送的數(shù)據(jù),對托盤流水線上的托盤上的物品進行分揀,放置于物品盒流水線上的指定物品盒中,同時把空托盤放置于空托盤庫中。
圖 1-1 整體組成
2、系統(tǒng)整體設(shè)計目標(biāo)本系統(tǒng)再現(xiàn)工業(yè)現(xiàn)場從倉儲、搬運、分揀以及包裝的全過程,將目前工業(yè)自動化現(xiàn)場前沿的實用技術(shù)和方案引入到比賽當(dāng)中,通過比賽,讓學(xué)生能熟練掌握自動化科技的前沿應(yīng)用技術(shù),為我國從制造大國發(fā)展到制造強國,為工業(yè)智能制造培養(yǎng)一批有素質(zhì),能干活,干好活的新一代職業(yè)能手。
(1) 選用6軸關(guān)節(jié)型工業(yè)機器人+堆垛直角坐標(biāo)機器人+AGV移動機器人,該三種機器人都是目前工業(yè)現(xiàn)場應(yīng)用比較廣泛的機器人;——切合工業(yè)現(xiàn)場,體現(xiàn)機器人的多樣性;
(2) 將立體倉庫(碼垛機器人)+工件運輸(AGV機器人)+檢測分揀(機器視覺)+機器人自動分揀裝配(6軸機器人)+自動回收+自動包裝完美的融合。——詮釋智能工廠和智能物流的概念;
(3) 設(shè)置多物件和多工位+多倉儲,可以展現(xiàn)出非常多的組合場景, 不僅可以展現(xiàn)學(xué)生的控制系統(tǒng)和機器人的編程能力,同時也能展現(xiàn)學(xué)生的流程規(guī)劃策略和優(yōu)化能力;——真實展示實際工業(yè)和物流系統(tǒng)場景,非常適合于實訓(xùn)和比賽。
(4) 整個系統(tǒng)采用網(wǎng)絡(luò)化控制構(gòu)架,以及最新的控制系統(tǒng)。——學(xué)生能夠了解先進的控制技術(shù)以及編程方法。
3、工作流程
(1) 物品以托盤形式存儲在原料倉庫中(物品共有 8 種不同形狀高度的樣式,每個托盤上隨機放置 0-3 個物品,樣式也隨機,可能相同,也可能不同)。
(2) 物品隨托盤從碼垛機立庫出庫,由AGV 小車搬輸送至托盤流水線;
(3) 托盤在托盤流水線的 4 號工位停止,通過智能相機識別物品數(shù)量、類型、相對于標(biāo)定原點的位置、相對于標(biāo)定姿態(tài)的旋轉(zhuǎn)角度并傳輸給PLC;
(4) 識別完成后,托盤流水線把托盤傳輸?shù)?nbsp;1 號位置后停止;
(5) 主控系統(tǒng)把需要分揀物品的 XYZ 坐標(biāo)偏移和旋轉(zhuǎn)角度通過MODBUS TCP 協(xié)議依次發(fā)送給六自由度工業(yè)機器人系統(tǒng),六自由度工業(yè)機器人機器人按照事先編寫的程序流程,執(zhí)行抓取分揀;
(6) 六自由度工業(yè)機器人根據(jù)放置位置的XYZ 坐標(biāo)偏移和旋轉(zhuǎn)角度把物品放入禮品箱中。(禮品箱有 8 個格子,相同的工件放到同一
個格子,每個格子最多放 2 件物品。碼垛部分偏移運算由主控系統(tǒng)計算,整合到Z 軸偏移中給六自由度工業(yè)機器人)。
(7) 把物品取完后,六自由度工業(yè)機器人把空托盤也搬運放置到空托盤庫中。
(8) 物品裝滿物品箱后,流轉(zhuǎn)到下料碼垛區(qū)。(每個比賽區(qū)不會 使用全部物品樣式,應(yīng)取其中 2-3 種。當(dāng)中轉(zhuǎn)箱裝滿或物品無法按照規(guī)則放入物品箱時流入下一區(qū)域);
(9)當(dāng)物品箱碼到一定數(shù)量或原料出庫完成任務(wù)時停止比賽。
二、設(shè)備安裝
1、設(shè)備安裝
本設(shè)備共包括:工業(yè)機器人及控制柜、PLC 控制柜、托盤流水線、物品盒擺放流水線、AGV 小車等。比賽所用場地為 4m×8m,如圖 2-1 所示為裝備之間的大致布局,現(xiàn)場安裝時并不一定嚴格按照圖中所標(biāo)尺寸安裝,允許有所變動。在安裝時需要注意以下事項:
(1) 調(diào)節(jié)工業(yè)機器人安裝底座的四個地腳,使工業(yè)機器人的安裝底座水平;(水平儀)
(2) 調(diào)節(jié)托盤流水線和物品盒擺放流水線的水平;(水平儀)
(3) 以工業(yè)機器人為基準(zhǔn),確保托盤流水線與工業(yè)機器人的 Y 軸方向平行,確保物品盒擺放流水線與工業(yè)機器人的 X 軸方向平行;(具體調(diào)節(jié)方式見節(jié) 2.2)
(4) 確保托盤流水線前端滑輪的平切面低于AGV 小車的平帶面;(見圖 2-2)。
(5) 確保智能相機與托盤流水線垂直。(見圖 2-3)
圖 2-1 設(shè)備布局
圖 2-2 托盤流水線高度調(diào)節(jié)
圖 2-3 智能相機安裝
2、平行度調(diào)節(jié)如圖 2-4 所示,在工業(yè)機器人末端夾具上安裝了一個激光筆,具體調(diào)節(jié)步驟如下:
(1) 利用工業(yè)機器人的工具坐標(biāo)系調(diào)整機器人的姿態(tài),使得激光筆始終垂直于工業(yè)機器人的安裝基面;
(2)首先控制工業(yè)機器人運動到托盤流水線上方合適的高度,將激光筆發(fā)出的激光對準(zhǔn)流水線架上的鋁型材邊線,利用機器人的工具坐標(biāo)系,使機器人沿著基坐標(biāo)系的 Y 方向運動(注意降低機器人的運動速度),注意觀察激光是否偏離鋁型材邊線,并作適當(dāng)調(diào)整。
(3)利用同樣的方法調(diào)整物品擺放流水線,只是使機器人沿著坐標(biāo)系的X 方向運動。
圖 2-4 平行度調(diào)整
三、6 自由度關(guān)節(jié)型機器人6 自由度關(guān)節(jié)型機器人,如下圖 3.1 所示。6 個自由度,最大負荷 20KG,臂展>1.5m。
工業(yè)機器人在系統(tǒng)中的位置如下圖 3.2 所示。
圖 3.1 工業(yè)機器人在系統(tǒng)中的位置
機器人工作流程如下所示:
本系統(tǒng)安裝于托盤流水線中,當(dāng)托盤貨物到視覺檢測工位時, X-SIGHT 機器視覺系統(tǒng)對托盤內(nèi)的貨物進行視覺識別,并把識別的位置,形狀等特征數(shù)據(jù)給到中央控制器和六關(guān)節(jié)機器人,由機械人根據(jù)目標(biāo)存放位置執(zhí)行相應(yīng)的動作。
圖 4.1 智能視覺系統(tǒng)整體圖
五、流水線1、托盤流水線
負責(zé)把貨品托盤輸送到視覺檢測工位,經(jīng)視覺定位識別輸送到抓取工位,由機械手將托盤中的貨品,通過真空吸盤吸放到相應(yīng)物品盒中。當(dāng)貨品托盤中的貨物全部取空時,由機械手通過另一套真空吸盤將托盤吸放到空托盤存放處。
圖 5.1 托盤流水線效果圖
圖 5.2 托盤流水線倍速鏈實物圖
圖 5.3 托盤流水線與 AGV 對接口實物圖
2、物品盒流水線物品盒流水線采用板鏈結(jié)構(gòu),負責(zé)成品物品盒的裝箱及傳送,為5工位流水線,裝在3個物品盒(占用3個工位)。
圖 5.4 物品盒流水線效果圖
圖 5.6 物品盒流水線實物圖
本系統(tǒng)中6自由度工業(yè)機器人負責(zé)把托盤流水線上托盤中的貨品抓取到,根據(jù)規(guī)定的目標(biāo)物品盒,放入到相應(yīng)的位置。機械手裝載貨品限定在5工位的中間工位。如需裝載左右物品盒,通過左右移位將邊上的物品盒移到中間工位。如圖所示,從左到右設(shè)為1-5工位,當(dāng)前物品盒處于2 、3 、4工位,定義為物品盒A、B、C,機械手裝載3號工位的物品盒,即B物 品盒。如果需要裝載A物品盒,則流水線傳送機構(gòu)動作右移,當(dāng)右檢測物品盒傳感器接通時,流水線停止運行,此時機械手裝載A物品盒。如果下一個要裝載的是C物品盒,則流水線向左運行,碰到左面物品盒檢測傳感器時停止運行。系統(tǒng)中另設(shè)有零位檢測傳感器,以檢測物品盒處于中間工位。為防止物品盒滑落,在左右極限位置設(shè)有左右限位開關(guān),以防止控制失誤,致物品盒跌落。
物品盒流水線由步進電機控制,實際控制策略可以采用脈沖定位控制的方式。
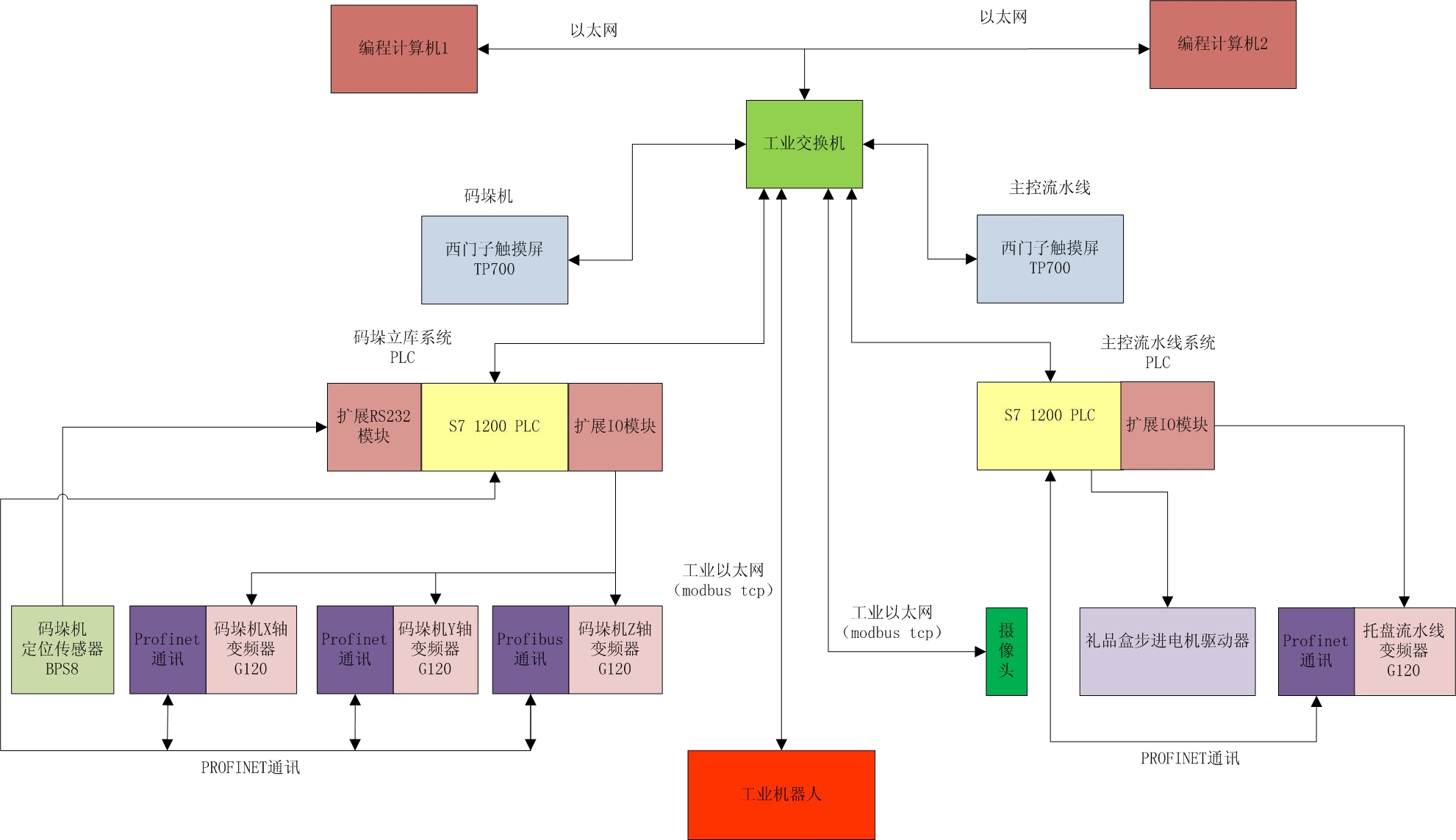
六、 電氣控制系統(tǒng)
本系統(tǒng)采用國際上先進的控制理念和最新的控制產(chǎn)品,采用網(wǎng)絡(luò)化控制模式,系統(tǒng)主要控制框圖如 6.1 所示。
圖 6.1 設(shè)備電氣網(wǎng)絡(luò)拓撲圖
如上圖所示,整個系統(tǒng)通過工業(yè)以太網(wǎng)總線,把工業(yè)機器人、主控流水線 PLC、碼垛機立庫系統(tǒng) PLC、碼垛機立庫系統(tǒng)觸摸屏、主控流水線觸摸屏、視覺系統(tǒng)、變頻器以及編程開發(fā)計算機等均通過以太網(wǎng)連接。編程開發(fā)計算機負責(zé)開發(fā)調(diào)試程序、視覺系統(tǒng)特征識別開發(fā)以及機器人示教等編程。碼垛立庫系統(tǒng)和主控流水線觸摸屏負責(zé)管理碼垛立庫系統(tǒng)、主控流水線的運行參數(shù),以及系統(tǒng)報警和提示信息等。