





- 電工電子電氣實訓設備
- 電力電子電機實訓裝置
- 過程控制實驗裝置
- 工業(yè)機器人智能制造
- 維修電工實訓設備
- PLC自動化實訓設備
- 數控機床實訓考核裝置
- 數控機床機械加工設備
- 機床電氣實訓裝置
- 機電一體化實訓設備
- 機械示教陳列柜
- 機械專業(yè)實驗設備
- 傳感器檢測實驗室設備
- 工業(yè)互聯人工智能實訓設備
- 特種作業(yè)操作實訓考核設備
- 物聯網實驗實訓設備
- 消防、給排水實訓設備
- 網絡布線實訓室設備
- 電梯安裝維修實訓考核設備
- 熱工暖通家電制冷實訓設備
- 樓宇智能化實訓設備
- 環(huán)境工程實驗裝置
- 流體力學實驗裝置
- 化工專業(yè)實驗實訓設備
- 新能源實驗實訓設備
- 電力供配電實訓設備
- 煤礦礦山實驗實訓設備
- 液壓氣動實驗室設備
- 教學仿真軟件
- 軌道交通實驗實訓設備
- 船舶實訓考核裝置
- 駕駛模擬訓練設備
- 新能源汽車實訓設備
- 汽車發(fā)動機底盤實訓臺
- 汽車電器電子實訓臺
- 特種車工程機械實訓設備
- 智能網聯汽車實訓設備
- 醫(yī)學教學模型
- 中小學實驗室設備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設備.教學掛圖
- LGDS-03型 智能制造設備技術應用平臺
- LG-DQYL01型 電氣回路故障排查與診斷裝置
- LG-X101C型 1+X考證工業(yè)機器人操作與運維工作站
- LG-RCZ01A型 工業(yè)機器裝調與運維員培訓考核系統(tǒng)
- LGJT-DC01型 手持式多功能交通調查儀
- LGJT-LD01型 便攜式激光雷達全息路口感知系統(tǒng)
- LGJT-HL01型 基于移動互聯的交通信息檢測系統(tǒng)
- LGJT-SJ01型 智慧交通大數據實驗平臺
- LGWL-HMC01A型 智能網聯座艙實訓臺(鴻蒙系統(tǒng))
- LG-LDG02型 鋰電池隔膜電壓擊穿測試儀(50點)
- LG-ZN011型 智能應急疏散培訓教學設備
- LG-XQT01A型 氣體滅火系統(tǒng)教學培訓設備
- LG-XM02A型 防火門監(jiān)控實操培訓設備
- LG-GMH12型 干式自動噴水滅火教學培訓系統(tǒng)
- LG-SMH13型 濕式自動噴水滅火教學培訓系統(tǒng)
- LG-DLK01型 電力系統(tǒng)綜合自動化實驗平臺
- LG系列 智能建筑實驗實訓裝置
- LGJS-3型 模塊式柔性環(huán)形自動生產線及工業(yè)機器人
- LGJX-82E型 立體倉庫實訓裝置
- LGJS-1型 現代物流倉儲自動化實驗系統(tǒng)
- LGJS-2型 模塊式柔性自動環(huán)形生產線實驗系統(tǒng)(工
- LG-2400型 數控模組化生產流水線綜合系統(tǒng)(CD制程
- LGJD-01型 光機電一體化控制實訓裝置
- LGJD-02型 光機電一體化控制實訓裝置
- LG-235A 光機電一體化高速分揀實訓系統(tǒng)
- LGK-III型 數控車/銑床綜合考核裝置(二合一/生產型
- LG-AT2型 自控原理與計算機控制實驗儀
- LG-NLY01型 樓宇智能化工程實訓系統(tǒng)
- LGZK-201G 自動化綜合實訓裝置( PLC、直流調速、觸
- LGPD-205B型 PLC、單片機及微機原理綜合實訓裝置
LGDS-03型 智能制造設備技術應用平臺
品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
一、功能總體介紹
近年來,新一輪科技革命和產業(yè)變革飛速發(fā)展,工業(yè)制造由數字化向網絡化、智能化深度拓展。應用模式和工業(yè)生態(tài),通過對人 、機、物、系統(tǒng)等全面連接,構建起覆蓋全產業(yè)鏈、全價值鏈的全新制造與服務體系。為工業(yè)乃至產業(yè)數字化、網絡化、智能化發(fā)展提供了實現途徑。
智能制造設備技術應用平臺,如圖所示,以工業(yè)機器人和協作機器人為核心,在操作平臺的四周合理分布有多種不同工藝應用的機器人工具以及搬運碼垛單元、原料庫單元、成品庫單元、裝配檢測單元、2D視覺檢測單元、3D視覺檢測單元、螺絲供料單元、皮帶輸送單元、緩存單元、加工單元、2D軌跡訓練單元、3D軌跡訓練單元、總控系統(tǒng)及操作面板等組件。該平臺深度集成了離線編程技術,軟件中不僅包含了與硬件平臺的相符三維模型資源,還大大簡化了搬運碼垛工藝實現的編程應用過程、提高軌跡復現精度、避免發(fā)生碰撞干涉。工作站包含了搬運碼垛工藝、分揀工藝、裝配工藝等工業(yè)機器人最典型應用,不僅滿足了職業(yè)院校不同專業(yè)學生針對工業(yè)機器人的操作和編程的教學需求,完全來源于工業(yè)應用現場的特征也使該工作站更加適合于作為職業(yè)技能競賽平臺。
智能制造設備技術應用平臺采用教育化的設計理念和工業(yè)化的設計方法,通過嚴密的計算以及合理的布局,將多種功能集成在應用平臺桌面上。
智能制造設備技術應用平臺教學任務的同時,還能夠根據使用者的想法,靈活的改變操作流程,降低或增加操作難度。擁有這種特性的應用教學平臺能夠伴隨學員不同階段的成長而不過時。
智能制造設備技術應用平臺取于工業(yè)應用場景,里面主要元件如工業(yè)機器人、協作機器人、鎖螺絲工具、皮帶輸送單元等均來自實際應用場景。
智能制造設備技術應用平臺,以實際工業(yè)應用場景為基礎,采用高度模塊化單元自由組合理念設計,主要包括設備架體單元、工業(yè)機器人單元、協作機器人單元、搬運碼垛單元、原料庫單元、裝配檢測單元、2D視覺檢測單元、螺絲供料單元、皮帶輸送單元、芯片供料單元、快換工具單元、成品庫單元、加工單元、3D視覺檢測單元、緩存單元、行星齒輪裝配單元、2D軌跡訓練單元、3D軌跡訓練單元、總控單元等硬件單元。
此款設備既可滿足學校針對機器人教學功能的要求,也可完成機器視覺的功能教學。設備體現了智能控制的基本概念,為后續(xù)要推廣的智能控制及智能制造兩大領域有很好的理解和影響力。下圖展示了各單元組成。
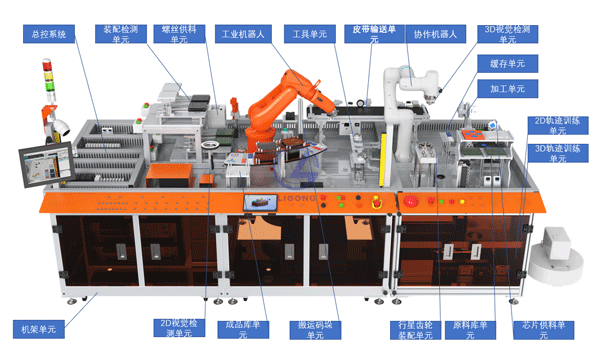
圖1 單元組成
二、設備單元介紹
1、設備架體單元
設備架體用于支持各單元,上臺面為型材臺面,各單元可方便在臺面安裝。具有腳輪,可用于移動設備。上面安裝有云監(jiān)控安全光柵、三色燈,另一臺架控制面板上也具有三色燈,用于顯示協作機器人運行狀態(tài)。控制面板安裝有急停開關,可在緊急情況下快速停止設備。架體前方可開門,可放置工具、行星裝配模塊、2D軌跡訓練單元、3D軌跡訓練單元等物品。如圖所示。
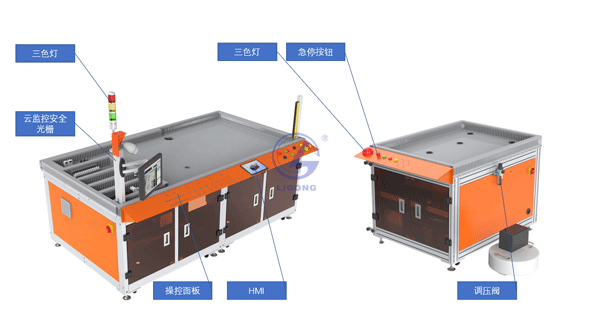
圖2 設備架體單元
2、工業(yè)機器人單元
采用ABB品牌的IRB 120,如圖所示,小巧靈活特性使其廣泛應用于3C、電子、食品等行業(yè),同時較小的工作半徑和額定負載,在保證功能實現效果的前提下,確保教學和競賽安全,防止發(fā)生人員以外,滿足工作站使用要求。

圖3 工業(yè)機器人
3、協作機器人單元
該工作站選用協作機器人,機器人參數如下:
|
ROKAE 機器人參數明細表 |
||
|
型號 |
SR3-C-H |
|
|
動作類型 |
多關節(jié)型 |
|
|
自由度 |
6 |
|
|
供電電源 |
48VDC |
|
|
工作溫度范圍 |
0℃~45°C |
|
|
最大動作速度
|
Axis 1 |
180°/s |
|
Axis 2 |
180°/s |
|
|
Axis 3 |
180°/s |
|
|
Axis 4 |
180°/s |
|
|
Axis 5 |
180°/s |
|
|
Axis 6 |
180°/s |
|
|
最大動作范圍
|
Axis 1 |
±175° |
|
Axis 2 |
-155°~﹢140° |
|
|
Axis 3 |
-175°~﹢135° |
|
|
Axis 4 |
±175° |
|
|
Axis 5 |
±175° |
|
|
Axis 6 |
±175° |
|
|
最大活動半徑 |
706mm |
|
|
手部最大負載 |
3Kg |
|
|
可重復性 |
±0.02mm |
|
協作機器人如圖所示。
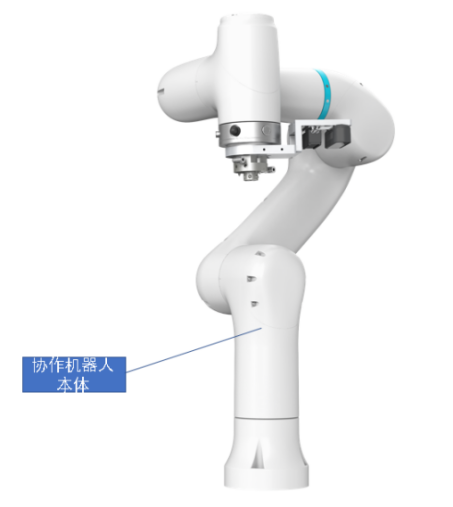
圖4協作機器人單元
4、螺絲供料單元
螺絲供料單元由1臺螺絲機組成,它通過旋轉式圓盤將成排的螺絲分成單顆供給,消除了螺絲重疊的現象,從而實現穩(wěn)定的裝夾。螺絲供給采用旋轉式分料比直線往返式,縮短了回原點時間,提高了螺絲的供給速度。

圖5 螺絲供料單元
5、裝配檢測單元
裝配單元提供多個裝配工位,如圖 所示,分別用于不同產品的裝配和檢測。不同產品對芯片種類、數量的要求不一,需要工業(yè)機器人根據要求從原料庫中選取所需的芯片后放置到指定位置,在完成所有芯片的安裝后,為產品安放蓋板并鎖緊固定螺絲。

圖6裝配檢測單元
6、2D視覺檢測單元
2D視覺檢測單元可以對工業(yè)機器人所選取芯片的顏色、形狀、位置等信息進行檢測和提取,如圖所示,并將檢測結果傳輸給工業(yè)機器人,以輔助其完成后續(xù)動作。視覺鏡頭配套檢測光源,可以盡量避免環(huán)境光源對檢測結果的影響。采用倒置式安裝,可以使機器人手持零件進行檢測,減少周邊配套設備,簡化機器人軌跡動作。

圖7 2D視覺檢測單元
7、成品庫單元
成品庫如圖所示,兩側是存儲芯片區(qū)域,中間是存儲電路板區(qū)域,分有合格區(qū)和不合格區(qū)。
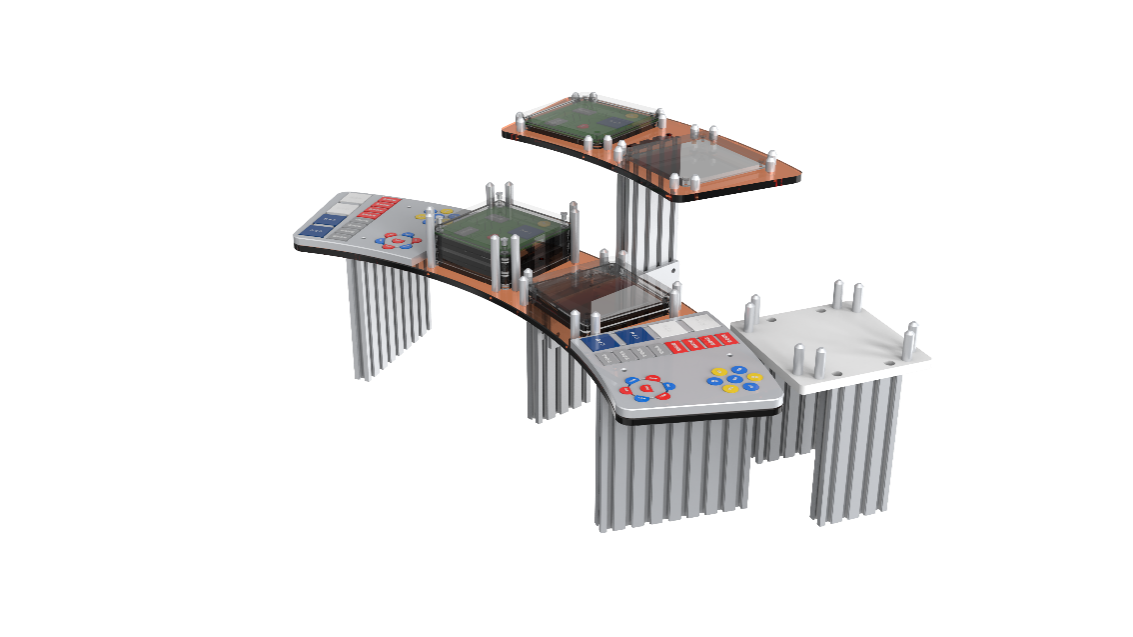
圖8 成品庫單元
8、搬運碼垛單元
搬運碼垛單元是將工業(yè)機器人對產品搬運碼垛工藝進行功能抽象化,工業(yè)機器人抓持夾爪工具將已完成生產的方形產品由原料臺按照要求搬運碼垛到指定位置,如圖所示,提供兩種不同類型的倉儲料庫,可以模擬傳送帶隊列式供貨和平臺堆垛,通過對物料轉移過程和堆垛形式的要求增加教學多樣性,提高編程復雜度。

圖9搬運碼垛單元
9、皮帶輸送單元
皮帶輸送單元是設備的重要組成部分,負責接駁CPU托盤的運輸,包括輸送機本體、氣缸定位機構、編碼器測速機構、光電開關等組件構成,如圖所示。芯片托盤在兩端位置可以用氣缸定位機構定位,方便機器人精準上料,編碼器可以實時測得皮帶線速度,以結合機器人和視覺相機進行動態(tài)抓取及物料識別。側面具有光電開關,可檢測芯片托盤位置。如圖所示

圖10 皮帶輸送單元
10、芯片供料單元
芯片供料單元由料盒、翻轉機構、芯片定位機構、條形光源等組成。芯片可以在翻轉機構上進行正反方向改變,料盒振動功能,由氣缸伸縮實現。可實現芯片的重新排列。料盒兩側具有條形光源,可補償外部環(huán)境對于視覺的干擾。芯片定位機構是利用芯片的自重可進行二次定位,以便于協作機器人精準取放。如圖所示

圖10 芯片供料單元
11、快換工具單元
該設備快換工具單元共有8套工具,如下表所示。工業(yè)機器人可通過程序控制到指定位置安裝或釋放工具,實現了無需人為干預,工業(yè)機器人可在不同工具間自由切換,同時確保氣路正常,大大擴展了工業(yè)機器人的應用能力。
|
序號 |
名稱 |
功能示意圖 |
|
1 |
吸盤工具1 |
|
|
2 |
涂膠工具 |
|
|
3 |
夾爪工具 |
|
|
4 |
鎖螺絲工具 |
|
|
5 |
三爪工具 |
|
|
6 |
夾爪工具 |
|
|
7 |
吸盤工具2 |
|
|
8 |
吸盤工具3 |
|






12、原料庫單元
原料庫單元由鋁合金板材拼接而成,由架體、光電開關等組成。共有兩層四個庫位,每個庫位有光電開關進行有無檢測。用于存放檢測完成后的產品。上層用于存放合格產品,下層用于存放不合格品(倉位功能可自由設定)。同時也可放置芯片托盤。機器人根據檢測結果,將產品放入對應的倉位。下方集成了電磁閥、真空發(fā)生器、真空表等。方便集中調試管理。如圖所示。

圖11 原料庫單元
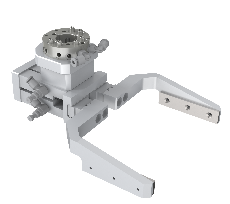
13、加工單元
加工單元由安裝架體、銑刀電動工具、打磨電動工具等組成,可對零件表面進行銑削以及打磨,并且兩個工具都可以調整角度,方便與機器人進行角度配合。非常詳細的展示實際生產中這兩種不同的加工工藝,極大的加深了學生對兩種工藝理解和認知。如圖所示。

圖12 加工單元
14、3D視覺檢測單元
3D視覺檢測單元是整個設備的核心單元之一,基于雙目結構光3D成像技術獲取物體的深度圖像,具有高精度、廣視角等技術特點。可根據視覺系統(tǒng)的處理結果,機器人可進行物料無序分揀、形狀識別、顏色識別。如圖所示。
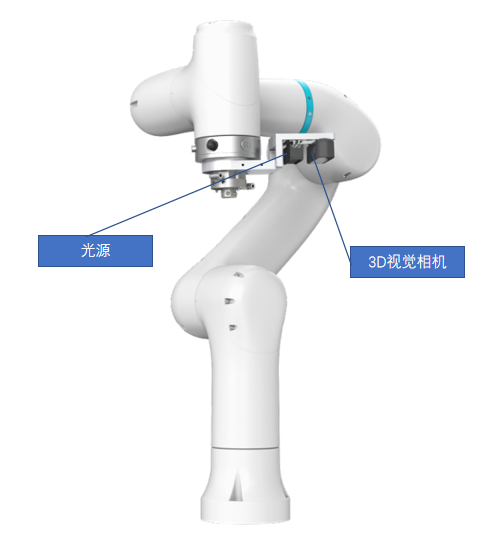
圖13 3D視覺檢測單元
15、緩存單元
緩存單元是機器人將分揀后的芯片放入定位板內;可以根據需求設定,讓機器人取揀選不同的芯片放至對應的槽位。由支撐架體、定位板等組成。如圖所示。
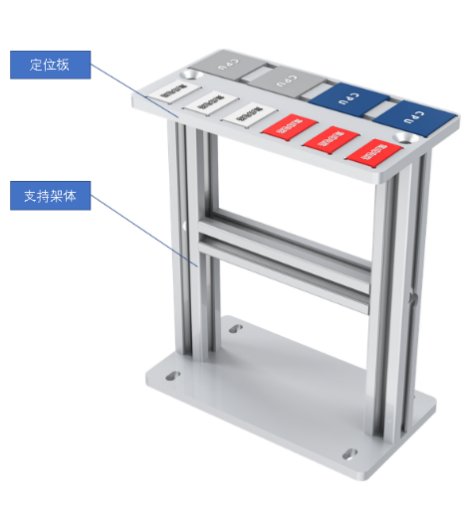
圖14 緩存單元
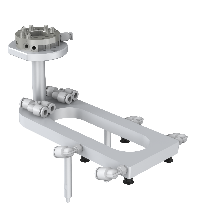
16、行星齒輪裝配單元
行星齒輪裝配單元是用于機器人和視覺進行柔性裝配的重要一環(huán),由支撐架體、行星輪、太陽輪、外齒輪等組成。此裝配過程通過視覺定位齒輪位置進行行星齒輪快速柔性裝配,可避免齒輪齒形誤差造成的安裝困難。并且很好的展示了協作機器人的力控特性。如圖所示。
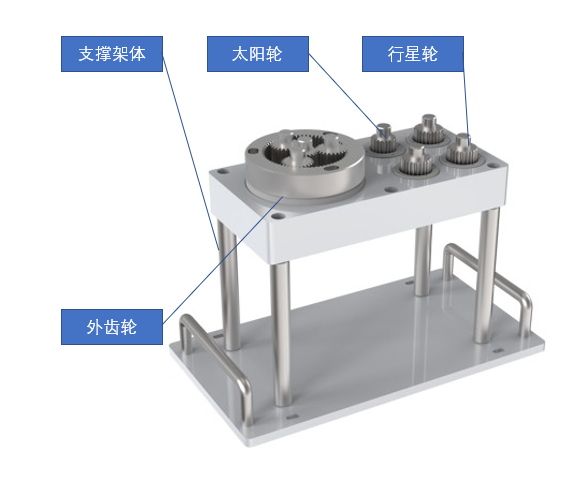
圖15行星齒輪裝配單元
17、2D軌跡訓練單元
2D軌跡訓練單元是將協作機器人對產品裝配前的涂膠工藝進行功能抽象化,協作機器人抓持涂膠工具沿軌跡板上不同輪廓軌跡運動,模擬涂膠工藝,軌跡板角度可調,保證工藝真實性同時增加教學可行性和趣味性。配備發(fā)動機模擬蓋板組件,實現定點位置處的軌跡訓練如圖所示


圖16 2D軌跡訓練單元
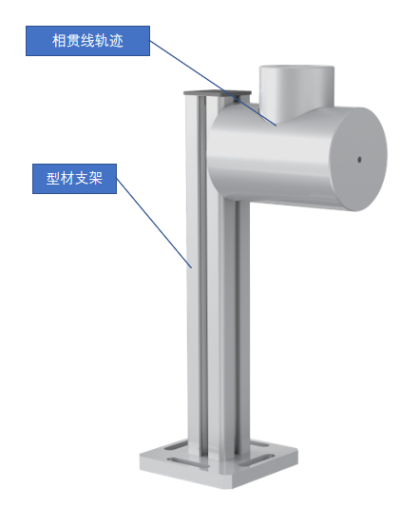
18、3D軌跡訓練單元
3D軌跡訓練單元是將協作機器人對焊接工藝進行功能抽象化,機器人模擬兩個圓柱零件焊接軌跡訓練,如圖所示。
19、總控單元
總控單元是各單元程序執(zhí)行和動作流程的總控制端,拓撲圖如下所示 。
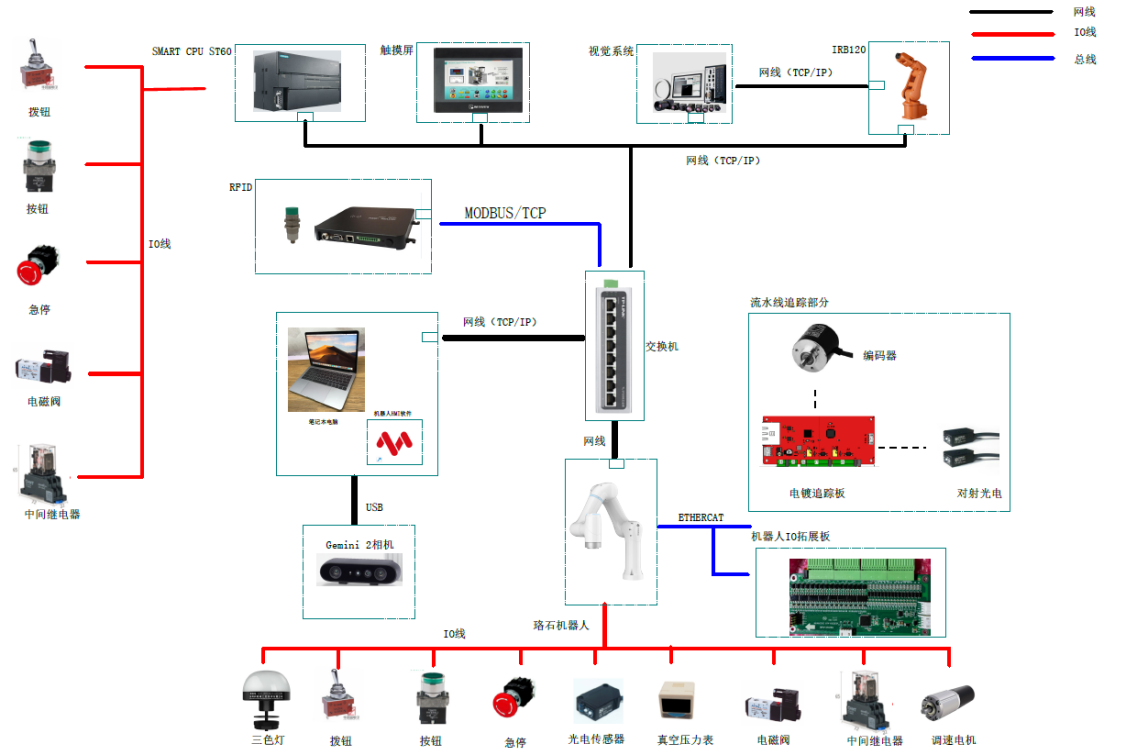
圖18 拓撲圖
- 上一篇:LG-DQYL01型 電氣回路故障排查與診斷裝置
- 下一篇:沒有了